请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-PGA460 Thread 中讨论的其他器件:PGA460、
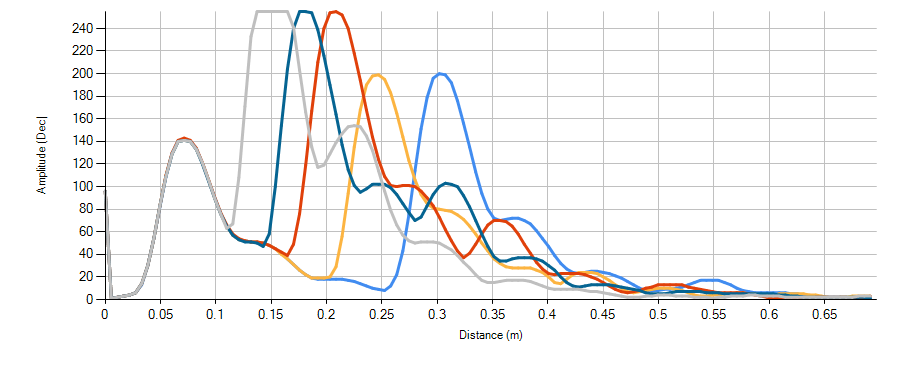
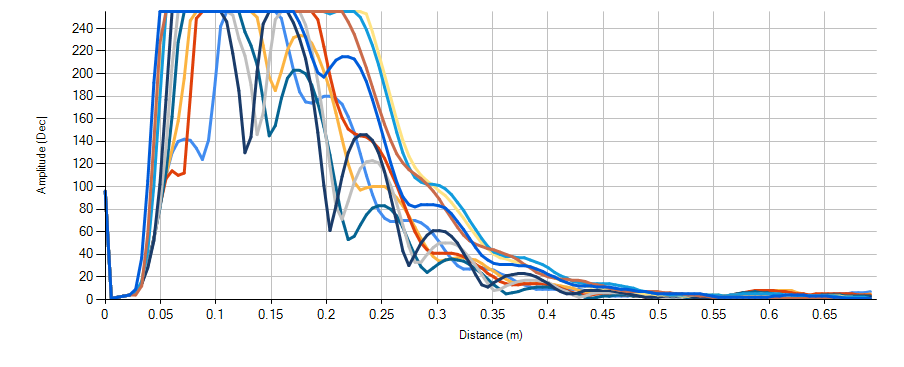
我将 PGA460与变压器驱动方法结合使用。 为了减小最小可测量距离、我想尝试使用双静态模式。 第一个问题是减少声学耦合。 但输出和输入信号之间似乎也存在相当大的电耦合。 如何减少这种耦合。 实际上、我无法从使用双静态模式中获得好处。
我将 PGA460与变压器驱动方法结合使用。 为了减小最小可测量距离、我想尝试使用双静态模式。 第一个问题是减少声学耦合。 但输出和输入信号之间似乎也存在相当大的电耦合。 如何减少这种耦合。 实际上、我无法从使用双静态模式中获得好处。