Other Parts Discussed in Thread: IWR1443
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443BOOST 主题中讨论的其他器件:IWR1443
工具/软件:Linux
您好!
我创建了一个 python 程序、用于通过串行端口配置和启动从 IWR1443到 BeagleBone 的数据流。
目前、我在接收器侧提供1秒的睡眠、然后我将获得大约4095字节的连续数据。 起始标头/魔术字在该4095字节数据中出现2-3次。
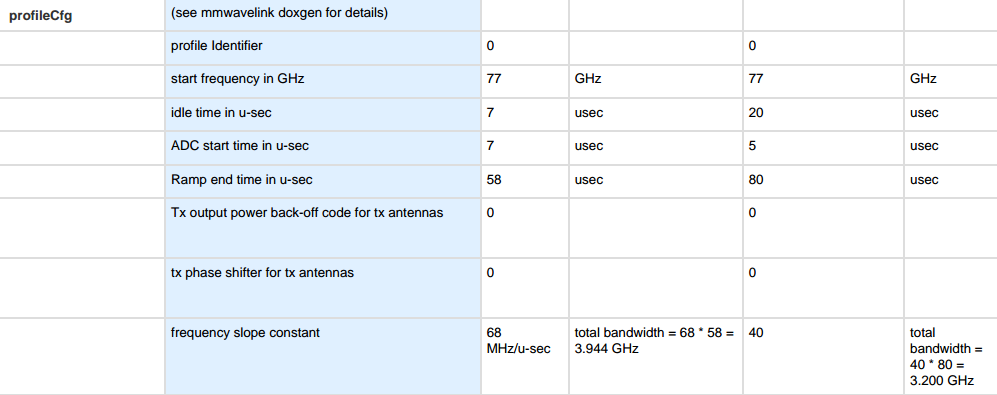
现在、我希望逐帧显示数据帧、以便我可以一次隔离信息。 为此、我在发送到毫米波时对 cfg 列表中的 framecfg 参数进行了更改。
I DID -'frameCfg 0 1 16 1 100 1 0'显示要发送的1个帧。 在这里、我想我犯了一个错误、因为我得到的确切627字节的数据从魔术字节正确开始、最后以几个空字节结束、本质上是乘以32。 但是、在没有数据之后、我的毫米波黄色 LED 亮起、我必须重置毫米波才能再次使用它。
有什么建议吗?
谢谢。