If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
如果两种设计的较短侧尺寸相同、则赛道传感器相对于圆形设计有什么优势? PCB 上的安装孔将 ME 限制在高达300x400 mil 的表面。 这意味着与圆形设计相比、长侧赛道设计的距离仅为100mil。 很抱歉、如果我听起来很无知、但我在应用手册中找不到任何相关信息。 我确实发现下面的引述与您所说的内容相反:


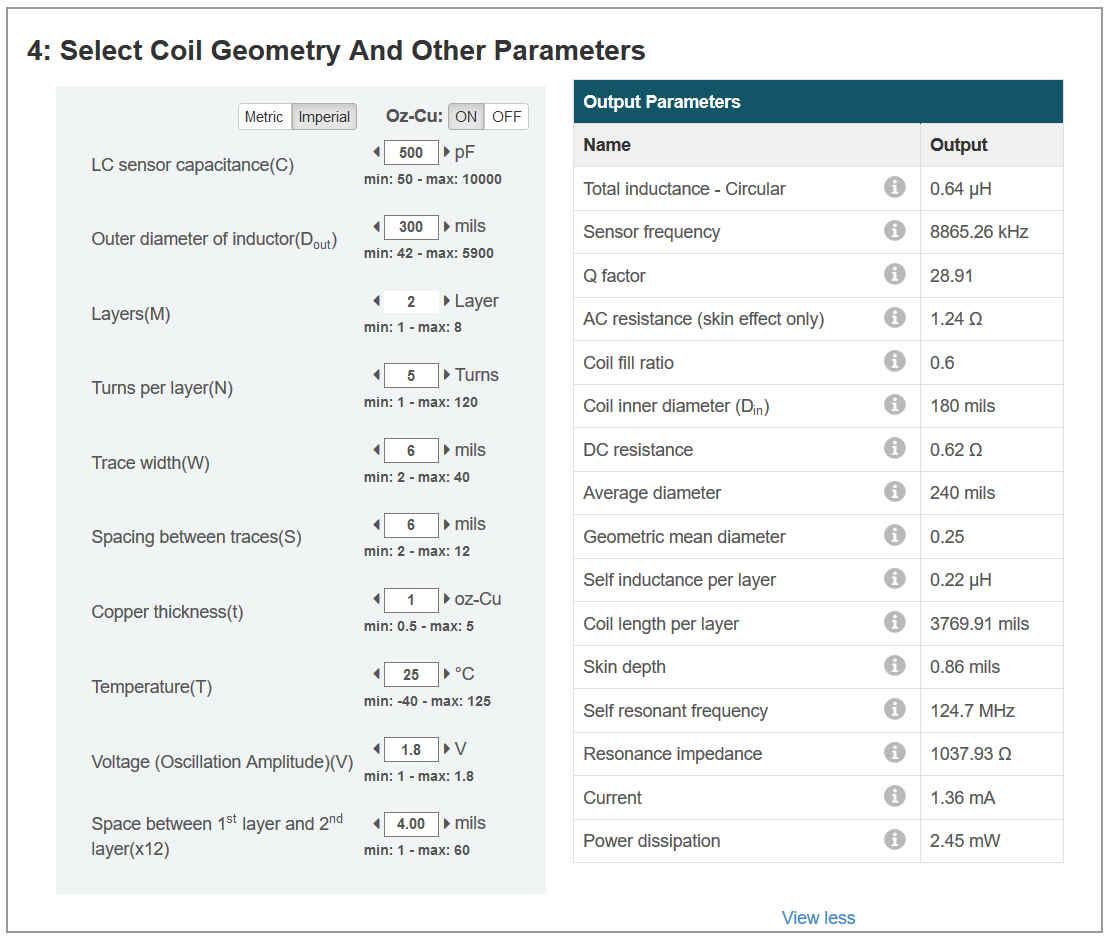
 设计工具
设计工具