

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642 工具/软件:TI-RTOS
请参阅以下内容
e2e.ti.com/.../669254
e2e.ti.com/.../653296

如果我发送 cmd (StartCommandLine)、它将 对配置(预设)进行硬编码。
这 是首次成功。
但它 将第二次失败。
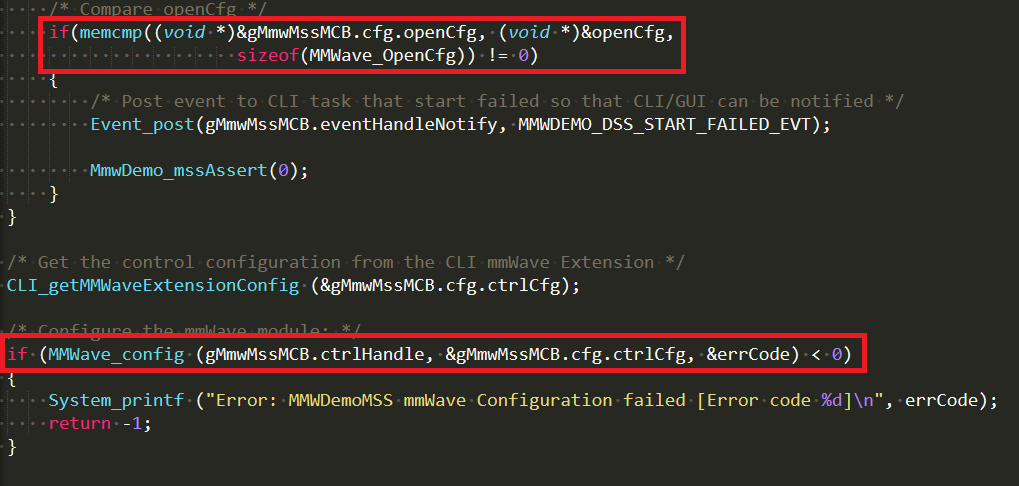
我看到错误来自 MmwDemo_mssDataPathConfig。
---cli_getMMWaveExtensionOpenConfig (.gMmwMssMCB.cfg.openCfg);
--cli_getMMWaveExtensionOpenConfig (&openCfg);
当它们不同时、将会出现错误。
如果我想使用 CLI。
如何 避免该错误?
此致、
Jui Yang
