请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/869470/ccs-iwr1642-iwr1642-srr
器件型号:IWR1642工具/软件:Code Composer Studio
我在使用 SRR 时发现了类似的问题、我将雷达放置在汽车的后侧、作为盲点 检测系统。
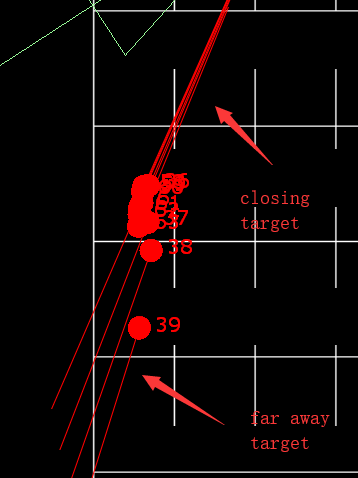
当我沿道路护栏以低于30公里/小时的速度行驶时、一切似乎都正常、当行驶速度超过30公里/小时时、多个关闭目标将显示稳定。这些关闭目标是原始目标点、 未跟踪目标、我想知道这些近距离目标是如何实现的?