请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1443BOOST Thread 中讨论的其他器件: AWR1443、 MMWAVE-SDK、 DCA1000EVM
我之前进行过以下交流。
e2e.ti.com/.../906433
--------------------------------------------------------------------
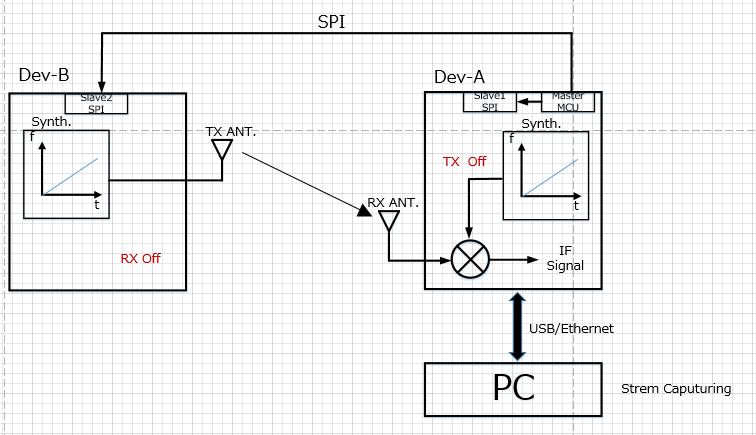
2) 2)是否可以通过一台 PC 将第一个 SPI 用作主器件、将第二个 SPI 用作从器件来控制 AWR1443BOOST 的两个单元?
是的、两个 AWR1443器件可以通过 SPI 相互通信。 您只需相应地编写应用程序即可。
--------------------------------------------------------------------
请告诉我创建应用程序的具体方法吗?
您尝试执行的操作是将一个 AWR1443BOOST 设置为仅接收模式、并将发送命令从第一个 MCU 发送到第二个 AWR1443BOOST 的 SPI 输入、以查看第二个 AWR1443BOOST 的 IQ 信号电平。 我在想。
更改第一个 mmWave Studio 的 API 可能还不够、我认为这是使用 MMWAVE-SDK 重写 SPI 相关命令的图像。
此外、MMWAVE-STIDO 不会显示由 MMWAVE-SDK 编辑的源的执行结果、它是否仅由毫米波演示可视化工具显示?
谢谢你。