请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DCA1000EVM 主题: AWR1843中讨论的其他器件
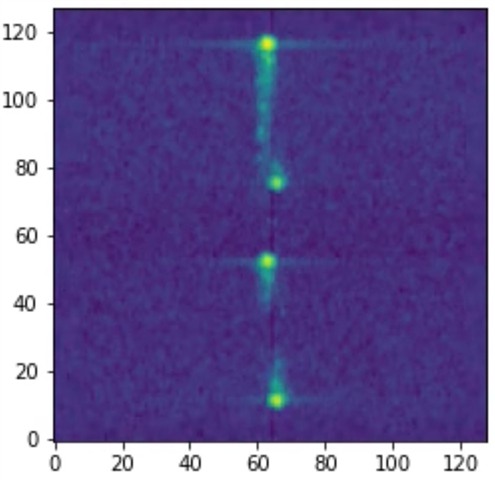
我按照《DCA1000EVM CLI 软件用户指南》、 使用 Windows 中的 AWR 1843BOOST 从 DCA1000收集原始数据。 一切都好、我成功收集了原始数据、但数据只是不正确。 我在下面看到的距离-多普勒图显示、只有一个目标在移动、但距离-多普勒图像中显示了4个目标。
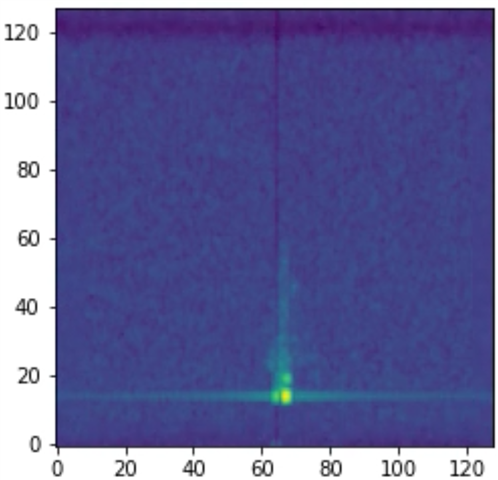
之后、我使用 mmWave Studio 来重复实验并收集原始数据。 然后、我生成另一张距离多普勒地图、如下所示、您可以看到只有一个按预期显示的目标。
因此、 这两种情况之间有两种差异:
1) DCA1000EVM CLI 软件 与 mmWave Studio
2) 2) mmWave_Demo_Visualizer 中的18xx_demo.bin 与 mmWave Studio 中的 xwr18xx_radarss.bin 和 xwr18xx_masterss.bin
有人能帮我看看这有什么问题吗?
此致!
Kevalen