

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944 主题中讨论的其他器件: AWR6843、 AWR1642、AWR1843、AWR2243
如果您已经在 使用 AWR1642/AWR1843/AWR6843 (第一 代)毫米波传感器器件、并想知道是否改用 AWR2944 (第二代)毫米波传感器、则继续阅读。
以下是具有高级特性差异的 b/w 第1代和第2代毫米波传感器(来自数据表)
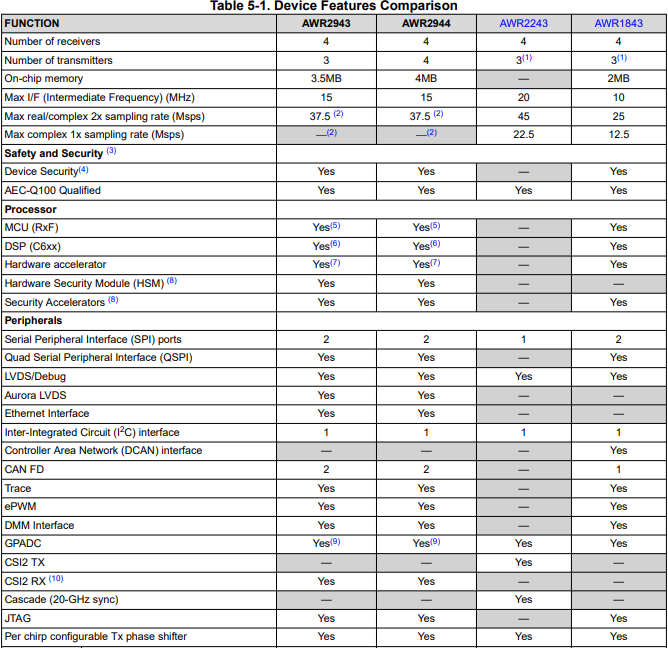
| 特性 | AWR2944. | AWR2243一起使用 | AWR1843 | AWR1642 |
| 最大距离(m)* | 180-200 |
200-250 (单芯片) 350+(4xAWR2243级联) |
120-150 | 60-80 |
|
波束形成/转向 (使用 Tx 移相器) |
可以 |
可以 |
可以 | 否 |
| 用例 |
角雷达、 前置雷达、 ACC、AEB、FCW |
前置雷达、 角度雷达 ACC (自适应巡航控制) AEB (自动紧急制动) AES (自动紧急转向) FCW (前部碰撞警告) |
ALC (自动通道变更)、 BSD (盲点检测) ACC、AEB、CTA (侧向来车警示)、泊车、 |
BSD、停车、ALC、CTA |
注: 毫米波传感器的选择完全取决于您的用例及其距离/速度/精度规格。 上述距离数据基于 TI EVM、器件线性调频脉冲/剖面配置、并可通过高增益天线和处理链进一步加以改进。 请参阅此应用手册以了解对象与范围 https://www.ti.com/lit/an/swra593a/swra593a.pdf
此处用例是这些器件所有可能用例中的一小部分、但用户可以通过其应用实现扩展这种可能性。
