请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642 您好!
我使用的是短程 TI 毫米波雷达 AWR1642。 通过数据收集、我观察到雷达提供长达10m 的深度检测(X 轴)。 我观察到的另一个特性是、雷达轴对齐、因此原点在中心、x 轴从零增加到最大值、y 轴的范围从正最大值到负最大值。 雷达和摄像头应用时、
- 我应该将原点移向一边吗?
- 水平(Y 轴)的最大检测距离是多少?
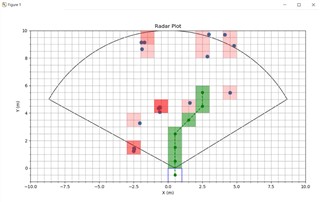
注意:在下图中、来自的图像显示水平范围为-8.5到8.5m、约为17m。 这是否有效?
如果您认为我在进行雷达摄像头校准时操作有误、请帮助我们完成雷达摄像头校准。
提前感谢。
迪帕克