请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-PGA460 主题中讨论的其他器件:PGA460、 ENERGIA
你(们)好!
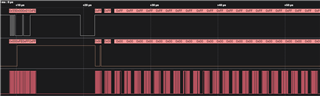
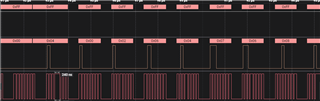
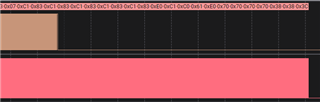
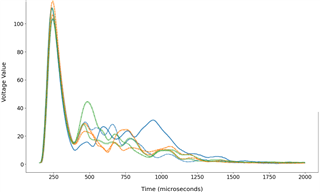
我们正在研究通过各种器件实现的超声衰减。 我们发现、由于传输脉冲的距离很短、在双静态模式下、传输线和接收线之间存在一些电容、因此我们可以在波形一开始看到信号尖峰、这种情况掩盖了信号。 根据我们的理解、这不应该出现、在观察与换能器连接的示波器时、我们看不到尖峰。 有关此尖峰的示例、请参阅下图:
为了解决这一问题、我们购买了另一个 PGA460板来将超声波脉冲的传输与接收分开、从而消除电容问题。 但是、我们也需要可通过在数据监控页面上选择 DSP - LP Filter On Graph Mode 获得的高分辨率数据。
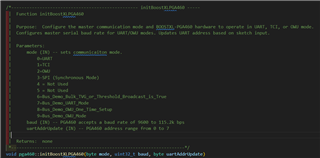
在使用 UART 和从 BusDemo Energia 草图中工作时、这似乎并不容易实现。 我看到过使用 SPI 来获取数字化 ADC 信号、然后做我们自己的 DSP、 但我不太擅长电子学、在想我们能否获得一些指导来了解如何使用一个 PGA460板传输信号、并使用一个 PGA460板接收信号、从而获得高分辨率 ADC 波形。
感谢您提供的任何帮助
插孔