Other Parts Discussed in Thread: TMAG5253, TMAG5170, TMAG5115, TMAG5110, TMAG5111, DRV5055, TMAG5273
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMAG5170 主题中讨论的其他器件: TMAG5115、 TMAG5110、TMAG5111、 DRV5055、TMAG5253、 TMAG5273
您好!
我正在 定制电路板设计中使用 DRV8350FHRTVR 电机驱动器和 F280041CRSHS Micro。 我们目前正在 使用 InstaSPIN-FOC 来 控制无传感器 BLDC PM 电机。
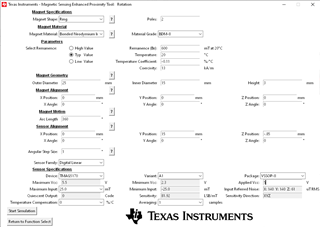
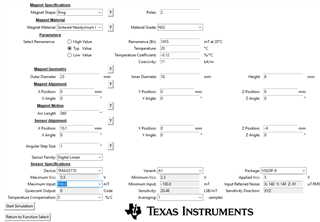
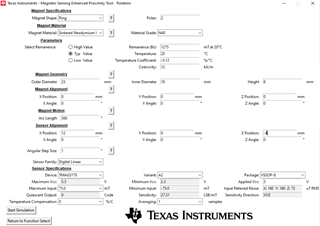
我想为系统添加位置反馈。 离轴传感器将我的系统最简单。 我的电机转轴通过我的电路板、因此 TMAG5170可能会达到理想效果。
这种类型的传感器是否适用于 BLDC 的位置反馈、这样我就不会有典型的无传感器启动问题? 如何确定传感器/目标磁体是否离定子/转子磁体太近或者这不是一个问题?
谢谢!