

您好!
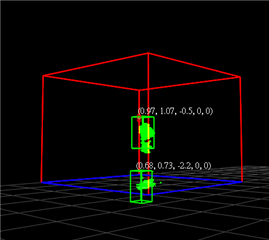
当运行3D 人员计数演示时、如果对象的上部和下部被错误地视为单独的轨道、则会发生"轨道拆分"。 如下图所示,它是一个人,但有两个 tarcks。 如何通过调整配置来修复它。 我想知道如何避免跟踪分离并提高雷达目标跟踪的准确性。 提前感谢。 凯尔
这是我使用的配置。
profileCfg 0 60.75 30.00 25.00 59.10 394758 0 54.71 1 96 2950.00 2 1 36
线性调频脉冲配置0 0 0 0 0 0 0 0 1
线性调频脉冲配置1 1 0 0 0 0 2
线性调频脉冲配置2 2 0 0 0 0 4
frameCfg 0 2 96 0 55.00 1 0
DynamicRAFFARCfg -1 4 4 2 2 8 12 4 12 5.00 8.00 0.40 1 1
StaticRACFARCfg -1 6 2 2 8 8 6 4 8.00 15.00 0 0
DynamicRangeAngleCfg -1 0.75 0.0010 1 0
Dynamic2DAngleCfg -1 3.0 0.0300 1 0 1 0.30 0.85 8.00
StaticRangeAngleCfg -1 0 8 8
antGeometry0 -1 0 0 -3 -3 -2 -1 -1 0 0 0
antGeometry1 -1 0 -1 0 -3 -2 -3 -2 -3 -3 -3 -3 -3 -2 -2 -2
antPhaseRot 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1
fovCfg -1 70.0 70.0
compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 0 1 0
StaticBoundaryBox -3 3 0.5 7.5 0 3
boundaryBox -4 4 0 8 0 3
传感器位置2 0 15
gatingparam 3 2 3 4
stateparam 3 3 12 500 5 6000
分配参数20 100 0.1 20 0.5 20
maxAcceleration 0.1 0.1 0.1 0.1
trackingCfg 1 2 800 2 46 96 55
presenceBoundaryBox -3 3 0.5 7.5 0 3
sensorStart
