请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1249105/iwr1843boost-iwr1843boost
器件型号:IWR1843BOOST主题中讨论的其他器件:IWR1843
您好!
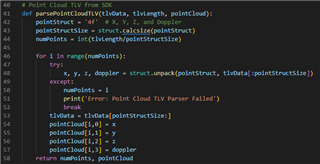
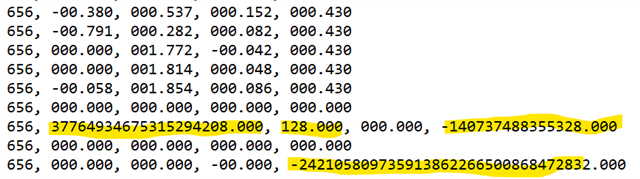
我想从 IWR1843传感器板中提取点云数据。 我在 TI 的雷达工具箱中找到了一个用于远程流式传输的 python 代码、可通过该代码从电路板上提取点云数据。 但是代码是针对 x6843的、尽管我的确将配置文件配置文件更改为了 IWR1843的配置文件配置文件。 它 很少工作 、但一直抛出与结构解包相关的错误。 附加错误图片供您参考。 请帮助我找到解压缩 python 中的结构数据或了解 tlv 结构的正确方法。 谢谢!