

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMAG6180-6181EVM 您好!
我对数据表中的机械图和传感器在外壳内所示/指定的位置有一些疑问。
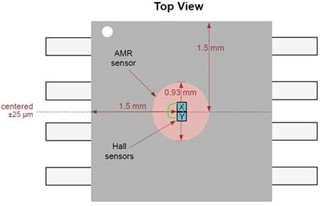
尚不清楚容差值"居中+- 25µm "是仅 AMR 传感器和/或霍尔传感器相对于封装中心的对齐。 以下哪种情况是正确的?
臂传感器与霍尔传感器的位置容差是多少?
未指定 x 轴上的对齐公差。 您能否提供该值?
此外、水平箭头不会到达机械臂/霍尔传感器的中间、而是到达霍尔传感器的末端(用绿色包络)。 如果不知道霍尔传感器的宽度、该值没有任何作用。 它的意图是什么? 箭头不应该以传感器的中间结束吗?
ARM 传感器和霍尔传感器在技术上是否与外壳或器件引脚对齐?
此致
