请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 您好!
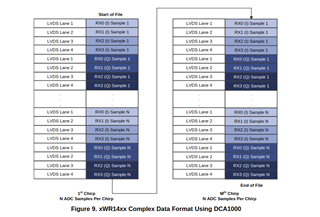
我将使用 DCA1000和 AWR1843BOOST 采集的原始数据样本创建距离多普勒图。 我正在检查将手移向和移离雷达的距离多普勒地图。 运动似乎正确、但我无法完全理解多普勒值(速度)在零轴上出现镜像的原因。 这意味着、当我看到一个团点在图中心附近移动时、我还看到一个类似的团点在图的底部或上部移动吗? 我只是对快时间和慢时间运行 FFT 来计算此距离多普勒地图。 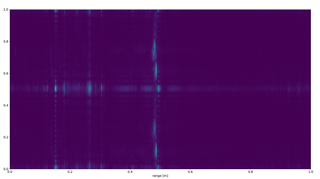
请参阅随附的图像、其中有一些对称区域靠近中心。