请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOP 主题中讨论的其他器件: IWRL6432
您好、TI!
感谢您的出色工作!
关于下面的图片、我有2个问题:
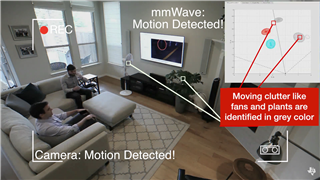
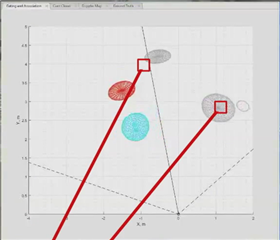
(1)在图中,主体和移动杂波显示为椭圆,颜色和形状/大小不同,如何从雷达输出获得椭圆参数,这些参数的物理意义是什么?
(二)如何识别人类主体的流动杂波?
另一个问题是如何将人与机器人和车辆等其他移动物体区分开来 、如本视频中所述:www.youtube.com/watch TI 毫米波雷达输出可以得出哪些有用的参数用于物体识别?