请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944 主题中讨论的其他器件:、 SysConfig、 DCA1000EVM
我要在定制电路板上的 AWR2944上启用 FRAME_START、CHIRP_START 和 CHIRP_END 脉冲。
定制板已确认可与来自 SDK 的 TI 示例以及高端角雷达实验室示例配合使用。
我已经对我的 PC 进行了设置、以便根据源代码重建应用映像、包括高端角雷达实验室示例和 SDK 中包含的演示。
该定制板的布局与 AWR2944EVM 几乎相同、可访问 R15、G15和 T17来测量信号。
我打开了 TI SysConfig GUI 工具以配置引脚映射、使用此工具分别向 R15、G15和 T17添加了 FRAME_START、CHIRP_START 和 CHIRP_END 信号。 我可以看到对 mss.syscfg 文件的修改、但右侧的所有其他文件都未更改。
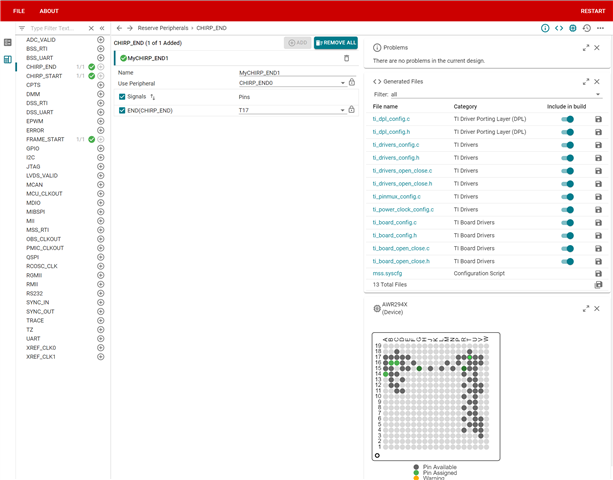
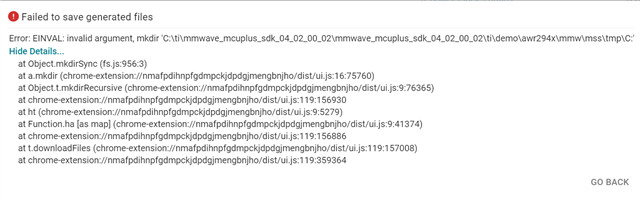
当我尝试保存所有文件或 mss.syscfg 文件时、该工具抛出错误、抱怨 Chrome 扩展名。
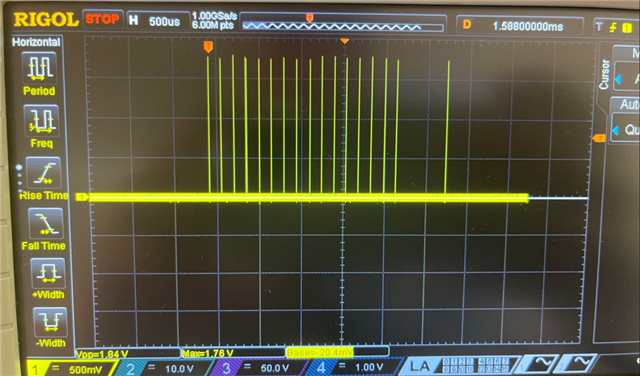
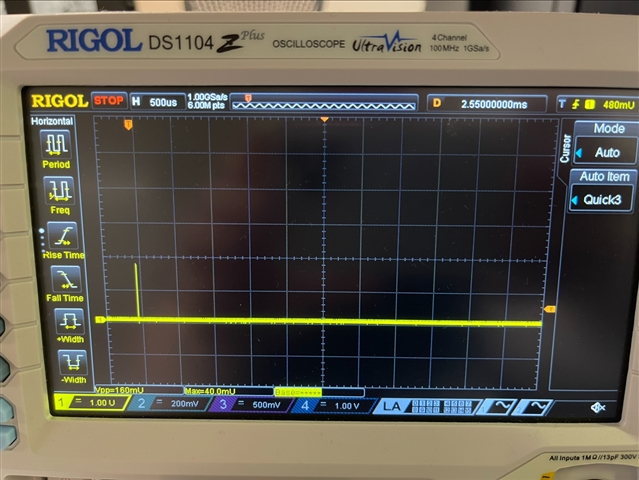
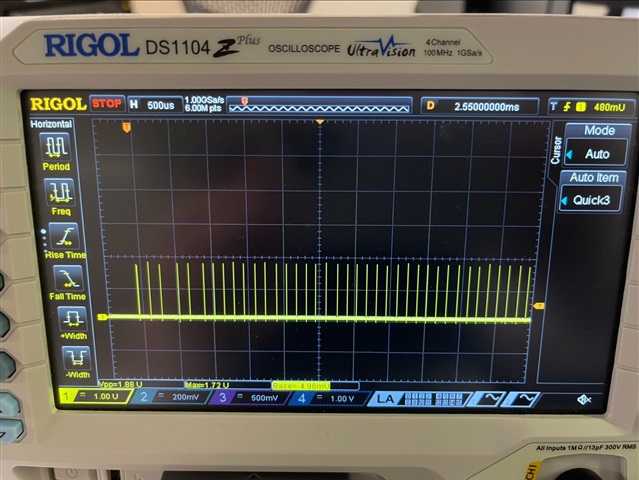
无论要保存什么错误、我都已手动修改该文件、并使用这个新的 mss.syscfg 从源重新编译 appimages。 但是、在刷写新的 AWR2944 TDM 演示映像(现在重新构建)之后、当我使用毫米波可视化工具加载配置文件并看到传感器正在运行时、我已配置的这些引脚上未生成脉冲信号。 我将使用示波器进行测量、但这些线上没有发生任何情况。
mss.syscfg 文件的新增内容:
/**
* These are the reserved peripherals and settings in this configuration
*/
const iCHIRP_END1 = scripting.addPeripheral("CHIRP_END");
iCHIRP_END1.$name = "MyCHIRP_END1";
iCHIRP_END1.$assign = "CHIRP_END0";
iCHIRP_END1.END.$assign = "ball.T17";
const iCHIRP_START1 = scripting.addPeripheral("CHIRP_START");
iCHIRP_START1.$name = "MyCHIRP_START1";
iCHIRP_START1.$assign = "CHIRP_START0";
iCHIRP_START1.START.$assign = "ball.G15";
const iFRAME_START1 = scripting.addPeripheral("FRAME_START");
iFRAME_START1.$name = "MyFRAME_START1";
iFRAME_START1.$assign = "FRAME_START0";
iFRAME_START1.START.$assign = "ball.R15";
Question:
1.这是否预计将这3个新引脚添加到 mss.syscfg 中、TI SysConfig GUI 工具中的所有文件(即 mss 生成的文件)都保持不变?
2.如果我的这部分配置是正确的,我是否需要在 mss_main.c 文件中添加一些内容,以配置这些引脚来生成输出脉冲?
非常感谢您提供任何指导或帮助、
标记