请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843 您好!
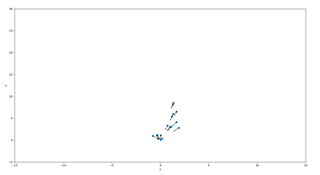
我正在使用 AWR 1843、正在进行开箱即用的实验(https://dev.ti.com/tirex/explore/node?node=A__ACG08uvVuwpX-4E74miWtw__radar_toolbox__1AslXXD__LATEST)、但我在 XY (0、0)处进行了奇怪的检测、正如您在以下屏幕截图中所见

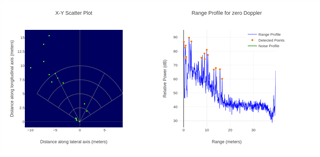
但是,与以下 pic 一样,现在有东西阻塞雷达:

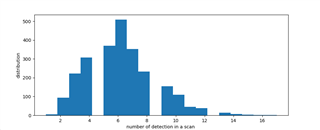
接下来的问题是,雷达给了我几个备件点云像(6检测 ),对于相同的 FoV 给出了超过20点,为什么,我需要在固件中设置 STH,以获得稳定,大约20点。
谢谢!
开发团队 Aitonomi