

我尝试了不同的. 从 MMWAVE_L_SDK_05_04_00_01可视化工具中删除了 CFG、
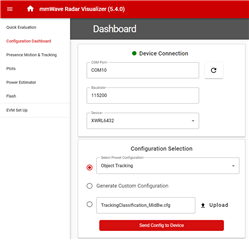
"配置仪表板"中的"配置选择"、
已从 SDK 示例文件夹中找到"Preset Configuration [Object Tracking]"和"CFG 文件 Values Differential
C:\ti\mmwave_L_sdk_05_04_00_01\examples\mmw_demo\mo_and_Presence _detection\profiles\xwrL64xx-evm
在哪里可以找到有关这些参数值的解释?
"预设配置"存储在何处?
%%:
%配置开始
%%:
sensorStop 0
通道配置7 3 0
chirpComnCfg 16 0 128 4 28 0
线性调频脉冲配置6 32 0 40 60.5
frameCfg 2 0 200 64 100 0
antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418
guiMonitor 2 3 0 0 1 0 1 0 1 1
Sigma 处理器 Cfg 32 2 3 2 8 8 1 0.3
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -70 70 -40 40
rangeSelCfg 0.1 10.0
离合器拆卸1
CompRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
ADCLogging 0
低功耗配置1
factoryCalibCfg 1 0 40 0 0x1ff000
BoundaryBox -3.5 3.5 0 9 -0.5 3
sensorPosition 0 0 1.9 0 0
StaticBoundaryBox -3 3 0.5 7.5 0 3
gatingparam 3 2 2 4
stateparam 3 3 12 50 5 200
分配参数6 10 0.1 4 0.5 20
maxAcceleration 0.4 0.4 0.1
trackingCfg 1 2 100 3 61.4 191.8 100
presenceBoundaryBox -3 3 0.5 7.5 0 3
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
分类器配置1 3 4
profileSwitchCfg 0 25 25
波特率1250000
sensorStart 0 0 0 0
%%:
%%:
%配置开始
%%:
%%:
% Trackbb Classification_Mid bw:线性调频脉冲配置和
%处理链设计用于检测、定位、跟踪和
%对室内或室外环境中的物体进行分类。
%此配置使用~1GHz BW (~20cm 距离分辨率)和
%启用 EVM 的所有可用六根天线。
此配置的最大消歧范围百分比为~10m。
%在此配置中、自动模式(主要和次要)已启用以跟踪
任何类型运动的%物体、包括细微运动。
%%:
sensorStop 0
通道配置7 3 0
chirpComnCfg 16 0 128 4 28 0
线性调频脉冲配置6 32 0 40 60.5
frameCfg 2 0 200 64 100 0
antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418
guiMonitor 2 3 0 0 1 0 1 0 1 1
Sigma 处理器 Cfg 32 2 3 2 8 8 1 0.3
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -70 70 -40 40
rangeSelCfg 0.1 10.0
离合器拆卸1
CompRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
ADCLogging 0
低功耗配置1
factoryCalibCfg 1 0 40 0 0x1ff000
BoundaryBox -3.5 3.5 0 9 -0.5 3
sensorPosition 0 0 1.9 0 0
StaticBoundaryBox -3 3 0.5 7.5 0 3
gatingparam 3 2 2 4
stateparam 3 3 12 50 5 200
分配参数6 10 0.1 4 0.5 20
maxAcceleration 0.4 0.4 0.1
trackingCfg 1 2 100 3 61.4 191.8 100
presenceBoundaryBox -3 3 0.5 7.5 0 3
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
分类器配置1 3 4
波特率1250000
sensorStart 0 0 0 0
%%:
配置结束百分比
%%:
