

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432 您好!
查看毫米波传感估算器中的 IWRL6432雷达配置时、我注意到速度分辨率计算存在不一致。
查看毫米波传感估算器中的 IWRL6432雷达配置时、我注意到速度分辨率计算存在不一致。
我的配置如下图所示:
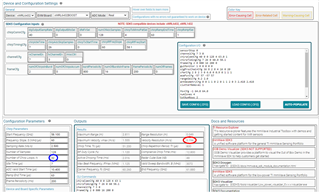
如您所见、我们处于"突发模式"、有2个 Tx 天线、每帧16个突发和每突发2个线性调频脉冲(每个 Tx 天线1个)。 突发持续800us。
在这种情况下、速度分辨率(用红色圈出)的计算方法正确为 (2 * MaximumVelocity)/ numOfBurstsInFrame = 2* 1.555/16 = 0.194m/s。
我现在已尝试切换到"正常模式"、使用相同数量的线性调频脉冲、并将由同一 Tx 天线传输的两个连续线性调频脉冲之间的距离保持在800us。
新配置如下图所示:

在本例中、由于线性调频脉冲重复周期已保持恒定、因此我希望具有相同的最大速度。 同时、鉴于线性调频脉冲数未改变、我希望也具有相同的速度分辨率。 但第一个期望已经实现、而第二个期望却没有实现。
我认为这是工具中的一个错误。
由于"正常模式"中的速度计算为 (2 * MaximumVelocity)/numOfChirpLoops、正确、我认为问题源于 numOfChirpLoops 的定义、在两种情况下均为32 (蓝色圆圈值)。
据我了解、如果是2个 Tx 天线、线性调频脉冲环路会描述一对线性调频脉冲的传输、一个用于第一个 Tx 天线、另一个用于第二个。 我希望 numOfChirpLoop 计算为
numOfChirpLoops = numOfBurstsInFrame * numOfChirpsInburst / numOfTxTianes
我还觉得这个不正确的 numOfChirpLoops 也会影响工具的其他输出。 numOfChirpLoops = numOfBurstsInFrame * numOfChirpsInburst / numOfTxTianes




