请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK-ODS 您好!
我将使用 IWR6843ISK-ODS 在 ros2 ubund22.04LTS 中使用、并使用小的障碍物检测二进制文件进行雷达-摄像头校准。
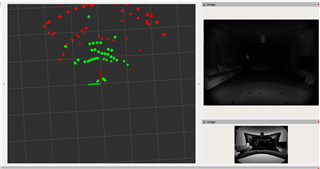
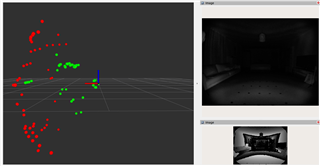
我正在使用放置在不同位置的角反射器、然后使用"Publish point"选项从 rviz2检查点的值。
在 ROS 中,坐标为 x: 前向+ve, y :左向+ve, z :高于+ve,但我观察到与我校准期间获得的值有差异。
我在中设置了传感器对地以及角反射器对地的位置。


而 CR 的位置如下,以及从"发布点"选项获得的坐标: 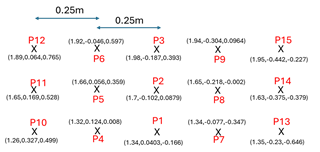
在这里、所有相邻的点在横向上相隔0.25m。 我还提到了从图像中的发布点获得的 x、y、z 点。
P12和 P15的 y 值之间的差值应接近1m 但为0.5m、而 z 值的差值接近1m、即0.992m。 对 P11&P14、P10&P13也是如此、对其他点也是如此。
我的 cfg 文件根据 ODS 天线具有正确的 compRangeBiasAndRxChanPhase、并再次重复该过程、但得到相同的结果。
此外、我尚未对 read-obj_struct 下的文件 DataHandlerClass.cpp 进行任何更改。
您能否根据上述数据判断是否需要交换 y 和 z 值? 坐标系是否存在此类差异?
此致、
普什卡尔