请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1843 工具与软件:
您好!
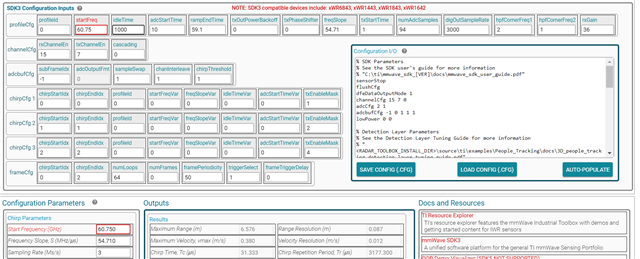
当我们尝试将速度分辨率设置为0.0234m/s 时遇到问题-您能提供工作配置吗:进一步降低分辨率(使它更精细)? 我们对每个线性调频脉冲的样本数(距离分辨率)不太感兴趣- 128就足够了、我们更有兴趣增加线性调频脉冲循环的数量(超过我们已经拥有的512个)。
提前感谢您。
工具与软件:
您好!
当我们尝试将速度分辨率设置为0.0234m/s 时遇到问题-您能提供工作配置吗:进一步降低分辨率(使它更精细)? 我们对每个线性调频脉冲的样本数(距离分辨率)不太感兴趣- 128就足够了、我们更有兴趣增加线性调频脉冲循环的数量(超过我们已经拥有的512个)。
提前感谢您。