

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6432AOP 工具与软件:
尊敬的 TI 团队:
参考毫米波 SDK 文档、我将尝试设置6432AOP 器件以捕获真正的地面速度。 该演示使用默认的.cfg 和工业可视化工具都可以正常运行。 现在我要修改演示、如 SDK 文档第二张图片所示。
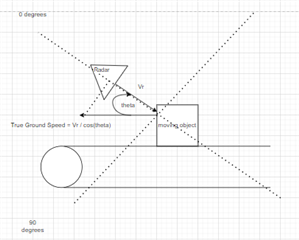
传感器应静止不动、且离地面应保持固定距离。 应确定从同一方向缓慢越过物体的速度。 到目前为止、我不知道必须在.cfg 中更改哪些参数才能实现此目的。 我曾尝试使用 SensorEstimator 工具。 但我不知道该工具中的设置与在.cfg 中创建的参数有何关系。 在这种情况下、找到合适配置的最佳方法是什么? 此致
