请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 主题中讨论的其他器件:AWR1843、 AWR1642
工具与软件:
嗨… 、
我们尝试从 Radar Toolbox-2.10.00.04中的 OUT_OF_Demo _1843中添加 CAN 的功能。
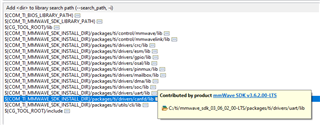
我遵循了文档"向现有的毫米波项目添加 CAN-FD Tx 和 Rx "、但它仍然无法正常工作..... 当我在 OOB 演示中浏览 mmw_cli、c 时、我在这里找到 uart_writePolling 函数。
在 main.c 文件中,我已经完成了所有的过程,作为文件.. 当它不工作时、我深入研究了 out_of_Demo _1843、并在 mmw_cli.c 文件中发现 需要调用 UART_writePolling 函数。
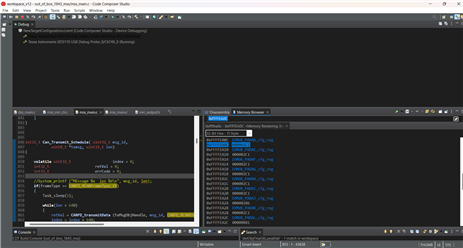
所以我应该调用 mmw_cli.c 中的 Can_Transmit_Schedule 函数。
谢谢!
Rehman