主题中讨论的其他器件: MMWAVE-L-SDK、 IWRL6432AOP、IWRL6432
工具与软件:
尊敬的专家:
我计划使用 IWRL6432BOOST 通过 xWRL6432 MMWAVE-L-SDK 05.04.00.01用户指南中的"基于 SPI 的流式传输过程"获取 ADC 数据。
我目前正在准备 C232HM-DDHSL-0电缆、并计划一收到就立即启动它。
我知道程序如下、但如果有任何错误、请告诉我。
我可以使用以下项目:
MMWAVE_L_SDK_05_04_00_01\examples\mmw_demo\mmwave_demo\xwrL64xx-evm4fss0-0_freertos\ti-arm-clang
对于该工程、我定义了 SPI_ADC_DATA_streaming=1、并在释放模式下编译。
我使用可视化工具将制作的 mmwave_demo.Release.appimage 写入闪存并运行 appimage。
(我知道我需要将 DIP SW 设置为运行、并设置 SW1.6=ON。)
我要确认设置以使用 adcDataSPIFTDI.exe。
我是否应该准备一条 C232HM-DDHSL-0电缆、安装 FTDI USB 驱动程序、下载 DLL、并将 ftd2xx.dll、ftd2xx64.dll 放在当前目录中?
我将使用输入 CLI 命令、但我应该输入 sensor parameter 命令、运行 adcDataSPIFTDI.exe 应用程序、然后启动 sensorStart 吗?
例如)
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 8 0 256 4 28 0
chirpTimingCfg 6 63 0 75 60
frameCfg 2 0 200 64 250 0
guiMonitor 2 1 0 0 0 0 1 0 0 0 0 0
sigProcChainCfg 32 2 1 0 4 0 15
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1 1
aoaFovCfg -60 -40 40.
rangeSelCfg 0.1 12.0
离合器拆卸1.
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
ADCLogging 2.
LowPowerCfg 0
factoryCalibCfg 1 0 40 0 0x1ff000
sensorPosition 0 0 1.44 0 0 0
adcDataSPIFTDI.exe
AOP 为"1"
"2"表示 FCCSP
输入设备:
2.
输入 ADC 样本数:
256
输入每次突发的线性调频脉冲数:
2.
输入每帧突发次数:
64
输入帧数:
0
输入 Rx 天线数量:
3.
sensorStart 0 0 0 0 0
我是否可以使用此方法获取 ADC 数据(adcdata.txt)?
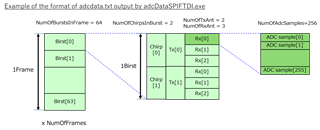
在哪里可以看到 adcdata.txt 的格式?
此致、