Other Parts Discussed in Thread: TMP126, TMP126EVM, INA229
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1424888/tmp126-tmp126
器件型号:TMP126Thread 中讨论的其他器件:、 INA229
工具与软件:
您好!
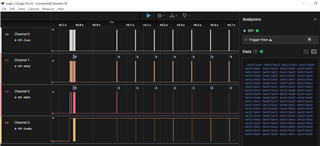
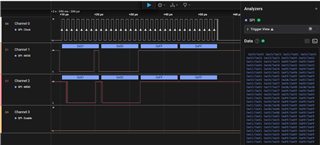
我正在使用 STM32F469BIT7微控制器通过 SPI1总线与 TMP126芯片通信。 不过、我会遇到芯片不响应命令(例如读取配置寄存器、温度结果寄存器、THigh_Limit 和 TLow_Limit 寄存器值)的问题。
根据我的理解、TMP126需要16位数据传输。 因此、我已将 SPI 总线配置为使用16位数据帧进行通信。
根据 TMP126数据表、"数据在串行时钟(SCLK)的下降边沿上计时输出、而数据在 SCLK 的上升边沿上计时输入。" 这意味着 SPI 模式应该为1、其中 CPOL = 0且 CPHA = 1。
以下是我配置的 SPI 设置:
- SPI 速度:5.625 MHz
- CPOL:0
- CPHA:1
- 数据宽度:16位
SPI 总线配置如下:
//设置 SPI 参数
Spi1Handle_power_board.instance = SPI1_POWER_BOARD;
Spi1Handle_power_board.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
Spi1Handle_power_board.Init.direction = SPI_DIRECTION_2LINE;
Spi1Handle_power_board.Init.CLKPhase = SPI_PHASE_2EDGE;
Spi1Handle_power_board.Init.CLKPolarity = SPI_POLARIT_LOW;
Spi1Handle_power_board.Init.DataSize = SPI_DATASIZE_16BIT;
Spi1Handle_power_board.Init.FirstBit = SPI_FIRSTBIT_MSB;
Spi1Handle_power_board.Init.Ti 模式 = SPI_TIMODE_DISABLE;
Spi1Handle_power_board.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
Spi1Handle_power_board.Init.CRCPolynomial =七;
Spi1Handle_power_board.Init.nss = SPI_NSS_soft;
Spi1Handle_power_board.Init.Mode = SPI_MODE_MASTER;
请查找随附的原理图以供参考。 您能否告知我可能做错了什么? 感谢您的帮助!