请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 主题中讨论的其他器件:AWR1843
工具与软件:
请告诉我如何修复毫米波雷达 awr1843 的问题。
1. dcan 具有诸如 CANFD_MCANInitParams 之类的 dataInterruptEnable 设置、可以确保在完成传输后重新输入数据中断调用?或者在何处设置?
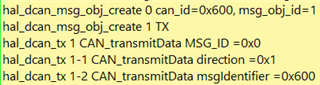
2.如果我想发送 CAN id * 3、那么我需要创建3次 CAN_createMsgObject()来获得3个不同的 txMsgObjHandle?