请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 工具与软件:
您好!
对于 MRR 波束控制示例、 由 HWA 执行1D (距离) FFT 处理 。
我想知道,
什么是 HWA 输入模式? 映射还是 隔离?
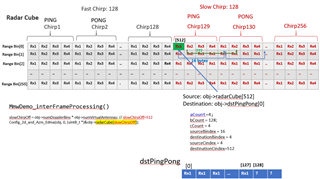
2. RadarCube 的格式是什么?
在哪里可以查看 源代码中的上述问题?

谢谢
BRS
Bruce
工具与软件:
您好!
对于 MRR 波束控制示例、 由 HWA 执行1D (距离) FFT 处理 。
我想知道,
什么是 HWA 输入模式? 映射还是 隔离?
2. RadarCube 的格式是什么?
在哪里可以查看 源代码中的上述问题?
谢谢
BRS
Bruce