请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1444091/iwrl6432-fuzzy-target
器件型号:IWRL6432工具与软件:
Dears、

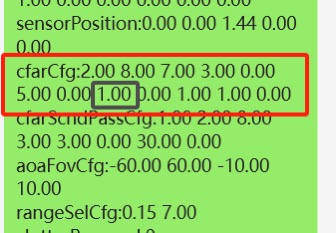
如上图所示、我们的 IWRL6432方案目前遇到了一个问题、即 A 和 B 目标置于雷达的左右两侧、并且 A 和 B 目标之间的距离大于分辨率;雷达将检测目标 A 和目标 B 之间的点;这个点实际上是生成的。