请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:PMP23069 工具与软件:
大家好、团队成员:
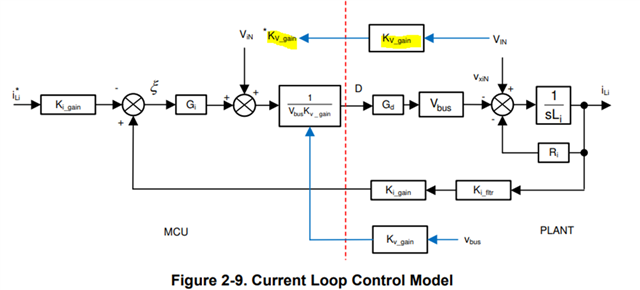
对于"runCurrentLoop ()"函数、在 PI 之后、gi_out 项被加入到瞬时交流电压除以总线电压中。 选择这一项而不是更传统的平均电流模式控制环路是否有原因? 只需要设法了解相应的优点和缺点即可
工具与软件:
大家好、团队成员:
对于"runCurrentLoop ()"函数、在 PI 之后、gi_out 项被加入到瞬时交流电压除以总线电压中。 选择这一项而不是更传统的平均电流模式控制环路是否有原因? 只需要设法了解相应的优点和缺点即可