请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
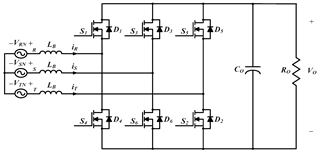
器件型号:TIDA-01606 大家好、我们将设计24KW 6开关双向 PFC、以便在 TIDA-01606参考设计中有 一个 SVPWM 函数、即 TINV_updateSVPWM (TINV_Vinv_dq0.a、 TINV_Vinv_dq0.b、TINV_Vinv_dq0.c);
我想在 lab7的参考设计中使用此函数、您能不能帮助我们如何将 SVPWM 函数用于6开关 PFC。