

您好、TI 的团队、
希望你度过美好的一天。
我在学习演示代码时遇到了一些问题。 有关详细信息、请参阅以下说明。 我期待您的回复。 感谢 您的帮助。
问题1:去耦网络的信号。
大家都知道、去耦网络的符号是不同 的、因为有四种不同类型的变换矩阵。 请参考以下信息(四个不同的转换矩阵和两种类型的去耦网络)。
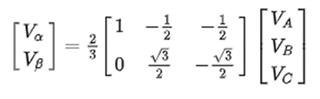
a)四种类型的变换矩阵。

b)两种类型的去耦网络。

经过研究,我相信第一种类型变换和等量变换在您的演示代码中使用,如以下所示。


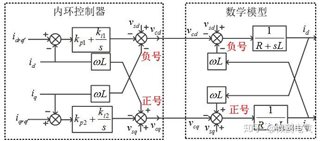
在我们计算数学 模型之后、基于 DQ 去耦的电流控制器及其数学表达式 如下所示。

但在您的演示代码中、去耦网络的符号 与我们相反。
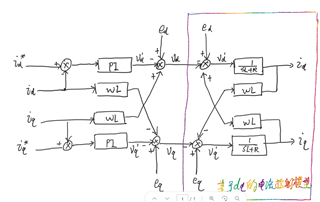
1.演示代码中的去耦网络。
代码执行
TINV_vdInv_pu =(TINV_gi_id_out +
(TINV_vGrid_dq0_pos.d *
(TINV_VGRID_MAX_SENSE_VOLTE/TINV_VBUS_MAX_SENSE_VOLTAGE)-
(TINV_iInv_dq0_pos.q * TINV_去 耦_const * TINV_AC_FREQ_Hz);
TINV_vqInv_pu =(TINV_gi_IQ_out +
(TINV_vGrid_dq0_pos.q *
(TINV_VGRID_MAX_SENSE_VOLTE/TINV_VBUS_MAX_SENSE_VOLTAGE)+
(TINV_iInv_dq0_pos.d * TINV_去 耦_const * TINV_AC_FREQ_Hz);
简化表达式
vd=+pi (s)*(id_ref-id_feedback)+ed-wl*iq
Vq=+PI (s)*(IQ_ref-IQ_feedback)+ed+WL*IQ
2.数学表达式

问题 2:有关输出 PI 控制器的符号。
如问题1所述、PI 控制器的符号为负、但在演示代码中、该符号为正。 原因何在?
vd=+pi (s)*(id_ref-id_feedback)+ed-wl*iq
Vq=+PI (s)*(IQ_ref-IQ_feedback)+ed+WL*IQ

问题3:有关直流链路电压前馈控制的详细建模方法。
直流链路电压前馈控制已添加到您的最新代码中、您能为我们分享一些相关的建模文档吗? 如果可能、您能否分享一些采用和未采用直流链路电压前馈控制的比较结果。
问题4:逆变器模式和整流器模式。
在演示代码中、对于 PFC 模式、TINV_idRef_pu =-1.0f * TINV_gv_vBus_out、 对于逆变器模式、TINV_idRef_pu = 1.0f * TINV_gv_v_vBus_out。
但在我看来、d 轴 代表电流幅度(有功分量)、而 q 轴代表转换器电流与电网侧电流(无功分量)之间的相位角。 所以我认为对于 PFC 模式和逆变器模式、 TINV_idRef_pu 需要保持相同。 我们需要 根据 PFC 模式和逆变器模式等更改 TINV_iqRef_pu。
TINV_iqRef_pu =0 (PFC 模式)
TINV_iqRef_pu = PI (逆变器模式)
