请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDA-010054 工具与软件:
尊敬的 Champ:
我要求为我的客户提供服务。
他们正在评估 TIDA-010054、对源代码没有任何问题。
(1)。 在进入 ISR 时、在 ISR1和 ISR2中会添加计数器(isr1Ticker++/ isr2Ticker++)、在 ISR2中、计数器是否有任何特定用途? 两个计数器有何用途?
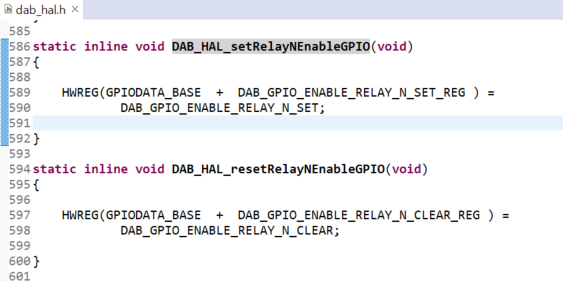
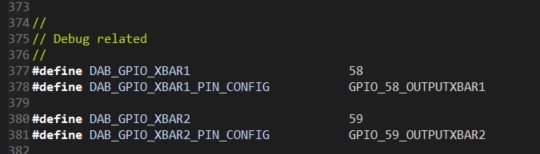
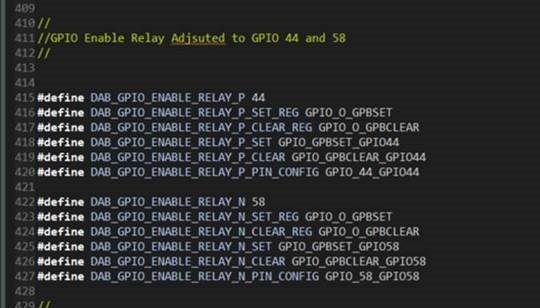
(2)。 重新定义 GPIO。 调试和中继控制与 GPIO58有冲突、但它未被使用、是否有任何保留/保留在源代码中的考虑因素? 对此有任何用途/设计顾虑?
(3)。 在 main.c 文件中有哪些 A0-A3、B0-B3、C0-C3任务切换模式和用途?
(4)。 ISR2中的慢启动模式命令、是否有流程图进行说明? 包含使用 IDFM 移动平均值和映射过程的反馈。
谢谢。此致、
Johnny