


主题中讨论的其他器件: HDC2010
您好!
我的问题是、我 使用 Power_SHUTDOWN (0、0)将 CC1310置于关断状态
我使用 GPIO 上的 IOC 唤醒、该功能 工作正常...一次...然后器件无限期保持关断状态。
在测试期间断开调试器。
任何指针都被赞赏。
下面是有关重现此问题的一些详细信息:
在我们的应用中、我们将 HDC2010传感器连接到 CC1310
HDC2010将中断引脚从高电平切换到低电平、以便在通过 I2C 准备好新的温度和湿度数据时触发
我们使用该引脚作为 CC1310的唤醒引脚、将数据传输到收集器、然后在数据采样之间进入关断状态。
采样率为每10秒一次
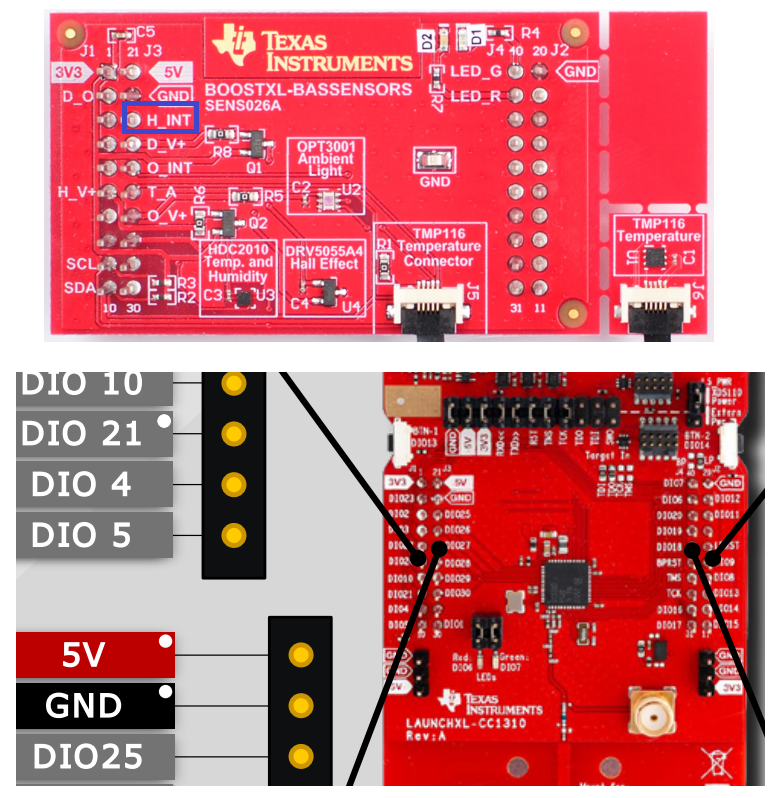
在硬件方面、我们使用 BOOSTXL-BASSENSORS 分线板与 CC1310 Launchpad
H_INT 是如图所示的唤醒引脚、它被配置为 IOID_25、因此我们知道硬件工作并且分配了正确的引脚。
在验证发生的情况方面、
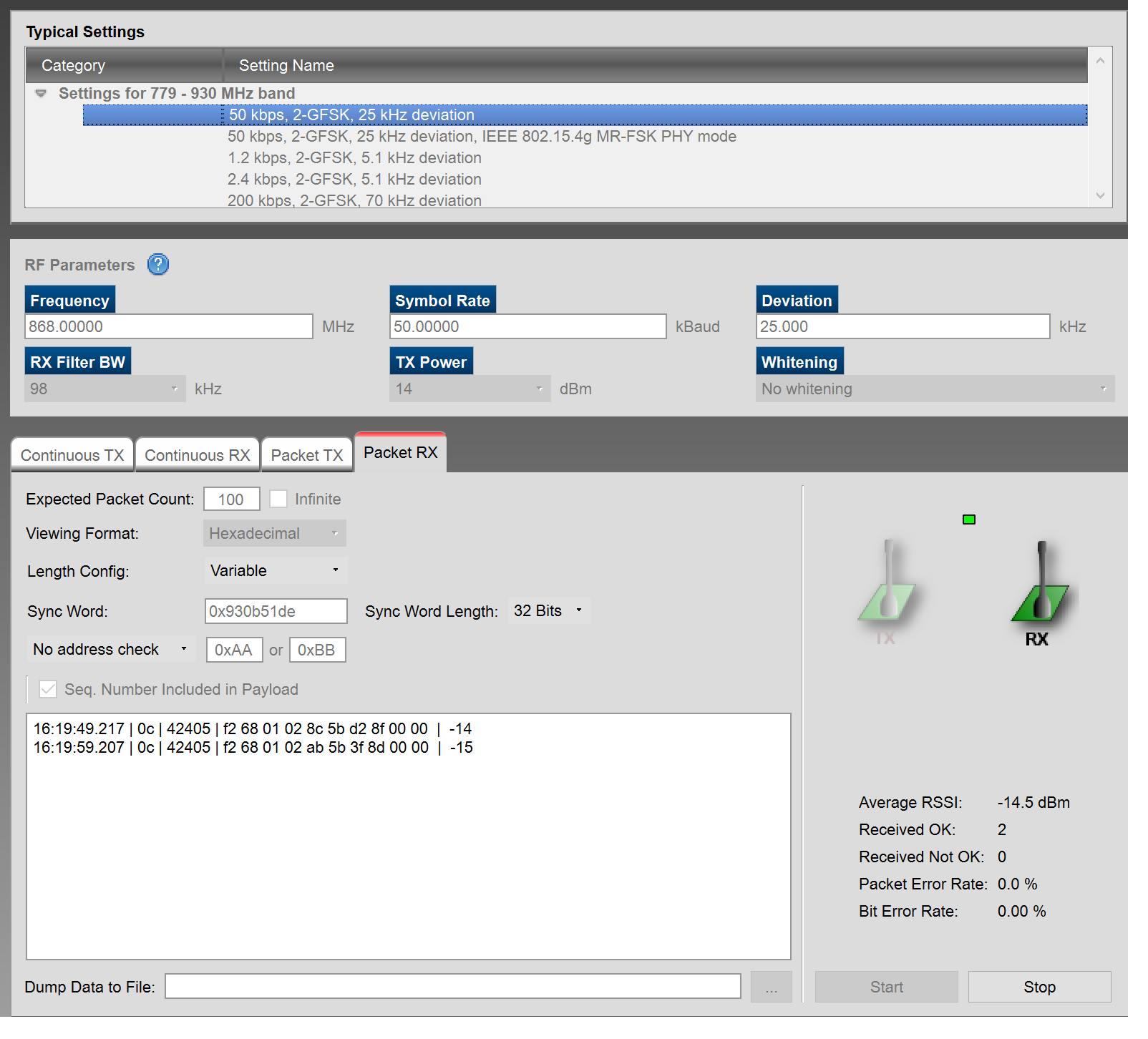
Smart RF 屏幕截图下方仅显示 收集器接收到的2个数据包
第一个数据包在发送器的第一个 POR 时、第二个数据包是第一个数据包、并且我们只能看到从关断状态唤醒。
请注意、它们之间的间隔正确为10秒
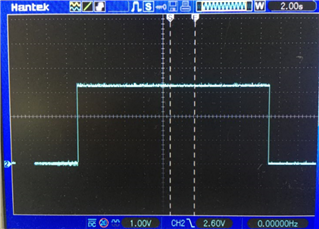
下面的 H_INT 引脚屏幕截图也显示它正确变为高电平、并在 HDC2010通电时保持高电平。
在 t=0sec 时、引脚在 HDC2010上电时变为高电平
在 t=10sec 时、变为低电平、太快、无法在宽范围时基上看到、但 CC1310正确唤醒、读取 int 状态、引脚恢复为高电平。
但是、CC1310不会在下一个采样间隔(t=20秒)唤醒
因此、总高电平持续时间为20秒。
以下是代码、
唤醒引脚在 CC1310_LAUNCHXL.h 中定义为#define BOARD_HDC_DRDY IOID_25
/*
* Copyright (c) 2019, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/***** Includes *****/
/* Standard C Libraries */
#include <stdlib.h>
#include <unistd.h>
/* TI Drivers */
#include <ti/drivers/Power.h>
#include <ti/drivers/rf/RF.h>
#include <ti/drivers/PIN.h>
#include <ti/drivers/I2C.h>
#include <ti/drivers/UART.h>
#include <ti/drivers/pin/PINCC26XX.h>
/* Driverlib Header files */
#include DeviceFamily_constructPath(driverlib/rf_prop_mailbox.h)
#include DeviceFamily_constructPath(driverlib/sys_ctrl.h) // Needed for SysCtrlResetSourceGet()
// Hardware & Board Header files
#include "HDC2010.h"
#include "Board.h"
/* Application Header files */
#include "RFQueue.h"
#include "smartrf_settings/smartrf_settings.h"
#define HW_VER 0x01
#define FW_VER 0x02
/* Packet RX/TX Configuration */
// -----------------------------------------------------------------------------------------------------
// Defines
#define PAYLOAD_LENGTH 12 // Max length byte the radio will accept
#define TX_DELAY (uint32_t)(4000000*0.1f) // Set Transmit (echo) delay to 100ms
#define PACKET_INTERVAL 500000 // Set packet interval to 500000us or 500ms
#define NUM_DATA_ENTRIES 2 // NOTE: Only two data entries supported at the moment
#define NUM_APPENDED_BYTES 2
// Variable declarations
static uint8_t HDC_data[4];
static uint8_t SGP_data[2];
static uint8_t txPacket[PAYLOAD_LENGTH];
// Buffer which contains all Data Entries for receiving data.
// Pragmas are needed to make sure this buffer is aligned to a 4 byte boundary (requirement from the RF core)
#pragma DATA_ALIGN(rxDataEntryBuffer, 4)
//static uint8_t rxDataEntryBuffer[RF_QUEUE_DATA_ENTRY_BUFFER_SIZE(NUM_DATA_ENTRIES,PAYLOAD_LENGTH,NUM_APPENDED_BYTES)];
static RF_Object rfObject;
static RF_Handle rfHandle;
//static rfc_propRxOutput_t rxStatistics; // Receive Statistics
//static dataQueue_t dataQueue; // Receive dataQueue for RF Core to fill in data
//static rfc_dataEntryGeneral_t* currentDataEntry;
//static uint8_t packetLength;
//static uint8_t* packetDataPointer;
// Prototypes
//static void echoCallback(RF_Handle h, RF_CmdHandle ch, RF_EventMask e);
// Pre-compiler Defines
//#define LOG_RADIO_EVENTS // Log radio events in the callback
#ifdef LOG_RADIO_EVENTS
static volatile RF_EventMask eventLog[32];
static volatile uint8_t evIndex = 0;
#endif
const unsigned short txPowerTable[] = {
0x0041, // 0dBm
0x10C3, // 1dBm
0x1042, // 2dBm
0x14C4, // 3dBm
0x18C5, // 4dBm
0x18C6, // 5dBm
0x1CC7, // 6dBm
0x20C9, // 7dBm
0x24CB, // 8dBm
0x2CCD, // 9dBm
0x38D3, // 10dBm
0x50DA, // 11dBm
0xB818, // 12dBm
0xA63F, // 13dBm
0xA73F, // 14dBm
};
/* I2C Configuration */
// -----------------------------------------------------------------------------------------------------
// I2C variables
I2C_Handle I2cHandle;
I2C_Params I2cParams;
I2C_Transaction i2cTransaction;
/* UART Configuration */
// -----------------------------------------------------------------------------------------------------
// Defines
#define UART_READ_DELAY 4 // 4 seconds
// UART variables
UART_Handle uart;
UART_Params uartParams;
const char echoPrompt[] = "Detail:";
char input[10];
uint8_t uartLineEndCount = 0;
/* GPIO Configuration */
// -----------------------------------------------------------------------------------------------------
// Pin driver handle
static PIN_Handle ledPinHandle;
static PIN_State ledPinState;
// LED Pin Table
PIN_Config pinTable[] =
{
Board_PIN_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MAX, // Grn Led initially On
Board_PIN_LED2 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, // Red Led initially off
PIN_TERMINATE
};
// WAKE-UP Pin Table
PIN_Config pinTableWakeUp[] = {
BOARD_HDC_DRDY | PIN_INPUT_EN | PIN_PULLUP | PIN_HYSTERESIS | PINCC26XX_WAKEUP_NEGEDGE,
PIN_TERMINATE
};
// -----------------------------------------------------------------------------------------------------
/* Flag to store whether we woke up from shutdown or not */
bool isWakingFromShutdown;
#define SENSOR 1
// Function definitions
// *********************************************************************************************************
void *mainThread(void *arg0)
{
// Get reason for reset - wake from shutdown, POR, etc
uint32_t rSrc = SysCtrlResetSourceGet();
if(rSrc == RSTSRC_WAKEUP_FROM_SHUTDOWN){
isWakingFromShutdown = true;
}
else{
isWakingFromShutdown = false;
}
// Open LED pins
ledPinHandle = PIN_open(&ledPinState, pinTable);
if (ledPinHandle == NULL)
{
while(1);
}
if(SENSOR) // SENSOR
{
// I2C COMMS Configuration
// -----------------------------------------------------------------------------------------------------
{
#define I2C_READ_DELAY 5000 // Delay in us or 5ms
uint8_t hds_status = 0;
I2C_init();
I2C_Params_init(&I2cParams);
I2cParams.transferMode = I2C_MODE_BLOCKING;
I2cParams.transferCallbackFxn = NULL;
I2cParams.bitRate = I2C_400kHz;
I2cHandle = I2C_open(Board_I2C0, &I2cParams);
if(I2cHandle == NULL){
// Error opening I2C
}
if(!isWakingFromShutdown)
{
sleep(5);
// Waking from Reset - Initialization of HDC2010
//HDC2010_peripheral_init();
I2C_Read(SGP_data,HDC2010_MANUFACTURER_ID_L_REG,2); // read Product ID (0x4954) to check I2C
hds_status = HDC2010_config_init(); // setup Interrupts and measurement mode
I2C_Write(0x01,HDC2010_MEAS_CONFIG_REG,2); // initiate measurement for first time
usleep(I2C_READ_DELAY); // N.B too small and DRRDy pin will remain low
I2C_Read(SGP_data,HDC2010_DRDY_INT_STATUS_REG,1); // clear existing interrupts
}
// HDC Read the 4bytes of Temperature & Relative Humidity data
if( !I2C_Read(HDC_data,HDC2010_TEMP_REG,4) ){
// HDC2010 Config failed, load dummy data
HDC_data[0] = 0xFF;
HDC_data[1] = 0xFF;
HDC_data[2] = 0xFF;
HDC_data[3] = 0xFF;
}
I2C_close(I2cHandle);
}
// -----------------------------------------------------------------------------------------------------
/* Radio Packet TX Configuration */
// -----------------------------------------------------------------------------------------------------
{
RF_Params rfParams;
RF_Params_init(&rfParams);
rfParams.nInactivityTimeout = 1000;
RF_cmdPropTx.pktLen = PAYLOAD_LENGTH;
RF_cmdPropTx.pPkt = txPacket;
RF_cmdPropTx.startTrigger.triggerType = TRIG_NOW;
/* Request access to the radio */
RF_cmdPropRadioDivSetup.txPower = txPowerTable[14] ;
rfHandle = RF_open(&rfObject, &RF_prop, (RF_RadioSetup*)&RF_cmdPropRadioDivSetup, &rfParams);
uint32_t macAddrLsb = HWREG(FCFG1_BASE + FCFG1_O_MAC_15_4_0); // Get unique lower 16bit of IEEE MAC address as RF ID
/* Set the frequency */
RF_postCmd(rfHandle, (RF_Op*)&RF_cmdFs, RF_PriorityNormal, NULL, 0);
txPacket[0] = (uint8_t)(0xA5);
txPacket[1] = (uint8_t)(0xA5);
txPacket[2] = (macAddrLsb);
txPacket[3] = (macAddrLsb >> 8);
txPacket[4] = HW_VER;
txPacket[5] = FW_VER;
txPacket[6] = HDC_data[0];
txPacket[7] = HDC_data[1];
txPacket[8] = HDC_data[2];
txPacket[9] = HDC_data[3];
//txPacket[8] = SGP_data[0];
//txPacket[9] = SGP_data[1];
/* Send packet */
RF_EventMask rfresult = RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropTx,RF_PriorityNormal, NULL, 0);
if (rfresult != RF_EventLastCmdDone)
{
while(1); // Error
}
/* Power down the radio */
RF_yield(rfHandle);
}
// -----------------------------------------------------------------------------------------------------
// Grn LED Off - going into shutdown
PIN_setOutputValue(ledPinHandle, Board_PIN_LED1, 0);
// Configure GPIO for Wake-up from Shutdown
PINCC26XX_setWakeup(pinTableWakeUp);
// Go to Shutdown
Power_shutdown(0,0);
// Should never get here!
//PIN_setOutputValue(ledPinHandle, Board_PIN_LED1, 1); // Grn LED On - Degging Only
//PIN_setOutputValue(ledPinHandle, Board_PIN_LED2, 1); // Red LED On - Degging Only
while(1);
}
}
