Other Parts Discussed in Thread: CC1125
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1125 工具与软件:
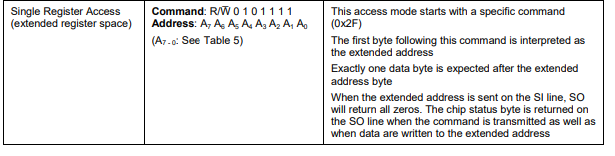
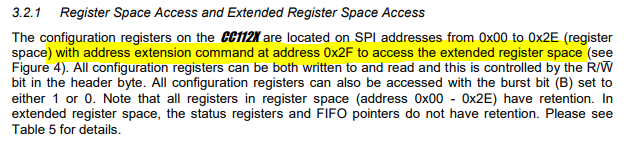
我目前从事 CC1125的驱动程序开发工作。 我尝试通过 SPI 接口在 PSoC6微控制器和 CC1125之间建立通信。 我已经浏览过 CC1125的数据表和用户指南、从这里我知道了校准序列。 我了解了用于设置 CC1125各种模式(即空闲、睡眠、发送和接收模式)的寄存器、有一些寄存器可以从一种模式切换到另一种模式。 我已经测试了 SPI 代码、它运行良好。 但是、当我尝试通过 SPI 发送0x8F 来获取器件型号时、无法获取 CC1125的器件型号、该值为0x58。 我将发送寄存器地址作为指令、它是1个字节。 在访问和读回寄存器时是否还需要注意其他事项? 请指派您团队中能够支持我的任何人来启动 CC1125、谢谢。 请考虑我的担忧。


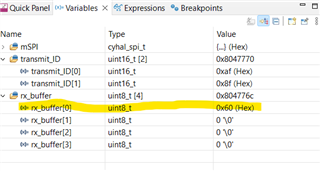 。 此外、我还要附加 SPI 代码。 请回顾并帮助我解决此问题。
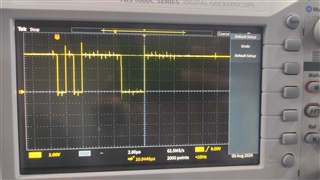
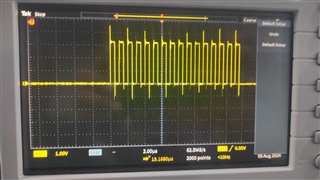
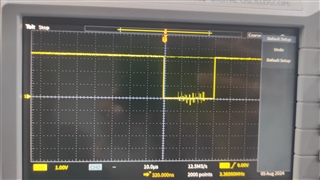
。 此外、我还要附加 SPI 代码。 请回顾并帮助我解决此问题。  谨随函附上这些图。
谨随函附上这些图。