请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
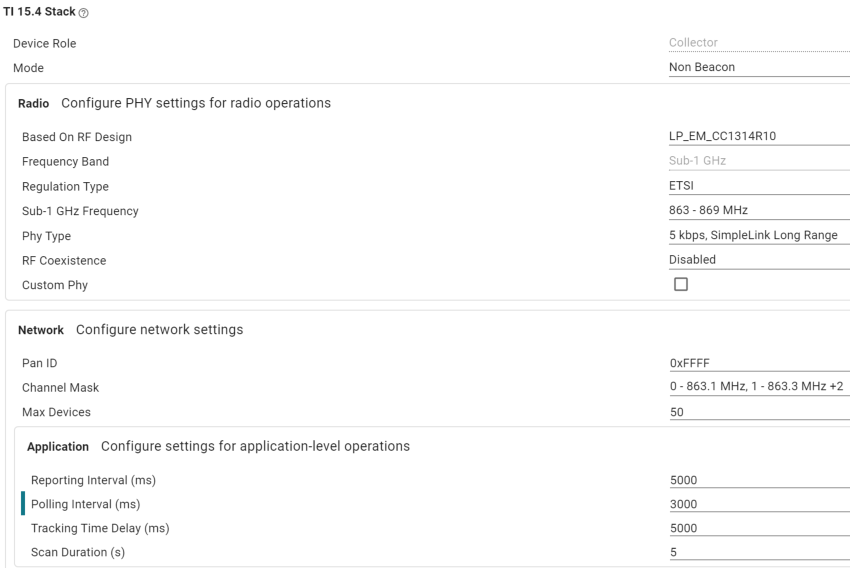
器件型号:LP-EM-CC1314R10 主题中讨论的其他器件: SysConfig、 CC1314R10、CC1354P10、 LP-XDS110ET
工具与软件:
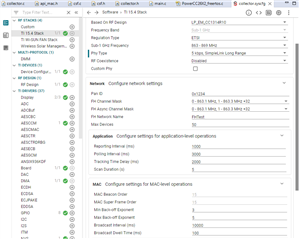
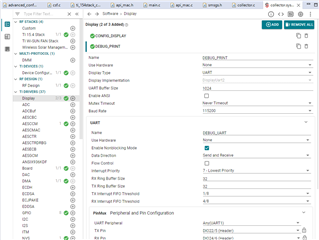
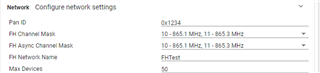
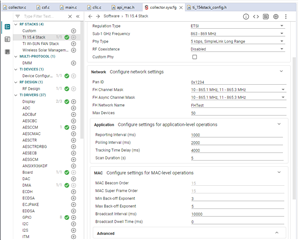
大家好、我是尝试合作的 LP-EM-CC1314R10 多个射频发送器和单个接收器。 是否可以通过任何可能的方法从多个发送器接收而不会在射频接收器端产生有效载荷损失、以及如何实现发送器和接收器的配置来实现这一场景?