请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC3235S 主题中讨论的其他器件:MMWAVEICBOOST、 IWR6843、 CC3235S、 SysConfig、 TIDA-010022
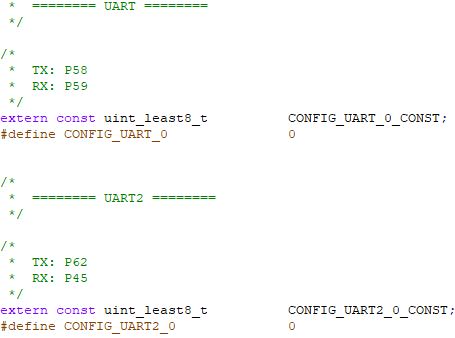
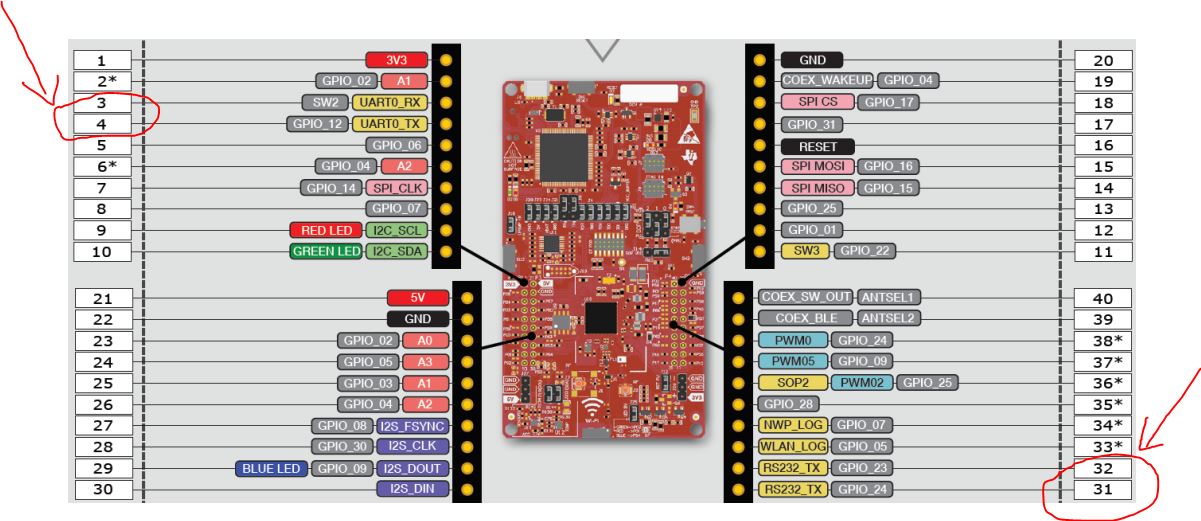
在 TI 的 TIDA-010022文档中、它提到了2个 UART 端口(数据端口和 CLI 端口)。 正如我看到的、MMWAVEICBOOST 仅使用 XDS110 USB 端口进行 UART 数据传输/图像刷写、CC3235仅在20引脚接头连接器上具有 UART RX/TX 引脚。 那么、每个模块上的 UART 数据端口和 UART CLI 端口是什么?
2.以前,我只通过 UART (MMWAVEICBOOST 上的 XDS110 USB 端口)将配置发送到 IWR6843。 为什么我需要根据本文档从 wifi 模块发送 Cfg? Cfg 位于 PC 中、因此我不知道 CC3235如何将 Cfg 发送到 IWR6843。
请向我展示照片中2个 UART 端口的位置以及如何将 Cfg 从 CC3235发送到 IWR6843 (为什么无法从 PC 发送?)