请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHCC3220MODASF 您好!
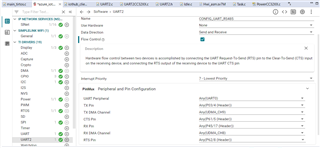
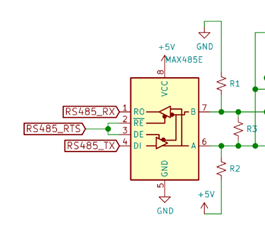
我们使用 RS485 Modbus (max485)、它是半双工通信。 如何设置 UART 参数?
我们使用下面的 UART 参数结构
uart.c
typedef 结构{
UART_Mode readMode;/*!<所有读调用的模式*/
UART_Mode writeMode;/*!<所有写调用的模式*/
uint32_t readTimeout;/*!<阻塞模式下读取调用的超时。 */
uint32_t writeTimeout;/*!<阻塞模式下写入调用的超时。 */
UART_Callback readCallback;/*!<指向回调模式的读回调函数的指针。 */
UART_Callback writeCallback;/*!<指向回调模式的回调函数的指针。 */
UART_ReturnMode readReturnMode;/*!<接收返回模式*/
UART_DataMode readDataMode;/*!<正在读取的数据类型*/
UART_DataMode writeDataMode;/*!<正在写入的数据类型*/
UART_Echo readEcho;/*!<回送接收的数据*/
uint32_t 波特率;/*!< UART 的波特率*/
UART_LEN dataLength;/*!< UART 的数据长度*/
UART_STOP stopbits;/*!< UART 的停止位*/
uart_par parityType;/*!< UART 的奇偶校验位类型*/
void *定制;/*!<驱动程序实施使用的自定义参数*/
} UART_Params;
它需要流量控制吗?