This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/wireless-connectivity/zigbee-thread-group/zigbee-and-thread/f/zigbee-thread-forum/824829/cc2530-sleep-modes
您好!
在睡眠模式(PM2)期间、终端设备是否与网络断开连接? 我的意思是、在唤醒事件之后、短地址是否在进入睡眠模式之前保持其先前的值???
提前感谢
是的、如果在项目中启用 NV_RESTORE、短地址应在进入睡眠模式之前保留其先前的值。
你(们)好
帮助设置 睡眠模式。 我将 ZigUP 与 ADC0 (连接器 P00)上的 TEMP6000传感器配合使用。 我需要每2分钟发送一次传感器数据。
zcl_zigup.h
#include #include #include #include #include "zcl_lighting.h" #include "zcl_exclosing.h" #include "zcl_zcl_zigup.h" #include "zcl_ha.h" #include "zcl_diagnostic.h" #include "zcl_udrech" #include "zdash.delay #include "zb"#dash.ld小时#include "#include "#gain"#zcl.id.h #include "#include "zcl.idr.h #"#include "#def"#include "zcl.idr.h #"#"#include "zcl_unt #def"#include "zcl.idr.h #include "#"#"#"#"#"zcl.ude"#"#"zcl.idr.h #include "#"#"#"#"#"#def"#"zcl.ude"#"#"#"#"#.ude"#"#"# //允许 SYS_APP_MSgs 静态 endPointDESC_t ZigUP_TestEp 的测试端点= { ZIGUP_Endpoint、 &zclZigUP_TaskID、 (SimpleDescriptionFormat_t *) NULL、//对于该测试端点 (afNetworkLatencyREQ_t) 0没有简单的说明 //无网络延迟请求 }; devstates_t zclZigUP_NWkState = DEV_init; void zclZigUP_reporting (uint16 report_reason) { const uint8 NUM_attributes = 8; //发送报告 zclReportCmd_t *pReportCmd; pReportCmd = osal_mem_alloc (sizeof (zclReportCmd_t)+(NUM_attributes * sizeof (zclReport_t))); if (pReportCmd!= NULL) { pReportCmd->numAttr = NUM_attributes; pReportCmd->attrList[0].attrID = ATTRID_ON_OFF; pReportCmd->atList[0].datatype = ZCL_datatype_Boolean; pReportCmd->attrList[0].attrData =(void *)(&State_Light); pReportCmd->attrList[1].attrID = ATTRID_CPU_TEMP; pReportCmd->atList[1].datatype = ZCL_datatype_single_PREC; pReportCmd->attrList[1].attrData =(void *)(&CPU_Temperature); pReportCmd->attrList[2].attrID = ATTRID_EXT_TEMP; pReportCmd->atList[2].datatype = ZCL_datatype_single_PREC; pReportCmd->attrList[2].attrData =(void *)(&EXT_Temperature); pReportCmd->attrList[3].attrID = ATTRID_EXT_HUMI; pReportCmd->atList[3].datatype = ZCL_datatype_single_PREC; pReportCmd->attrList[3].attrData =(void *)(&EXT_湿度); pReportCmd->attrList[4].attrID = ATTRID_S0_Counts; pReportCmd->atList[4].datatype = ZCL_datatype_uint32; pReportCmd->attrList[4].attrData =(void *)(&S0); pReportCmd->attrList[5].attrID = ATTRID_ADC_VOLT; pReportCmd->atList[5].datatype = ZCL_datatype_single_PREC; pReportCmd->attrList[5].attrData =(void *)(&ADC_Voltage); pReportCmd->attrList[6].attrID = ATTRID_DIG_INPUT; pReportCmd->atList[6]。datatype = ZCL_datatype_uint16;//布尔值或 uint8会导致每两个报告挂起... pReportCmd->attrList[6].attrData =(void *)(&dG_IN); pReportCmd->attrList[7].attrID = ATTRID_REPORT_REASID; pReportCmd->atList[7].datatype = ZCL_datatype_uint16; pReportCmd->attrList[7].attrData =(void *)(&report_reason); zclZigUP_DstAddr.addrMode =(afAddrMode_t) Addr16位; zclZigUP_DstAddr.addr.shortAddr = 0; zclZigUP_DstAddr.endpoint=1; zcl_SendReportCmd (ZIGUP_Endpoint、&zclZigUP_DstAddr、ZCL_CLUSTER_ID_GEN_ON_OFF、pReportCmd、ZCL_FRAME_CLIENT_SERVER_DIR、 false,zclZigUPSeqNum++); } OSAL_mem_free( pReportCmd ); }/ ********* * ZCL 通用配置文件回调表 */ static zclGeneral_AppCallbacks_t zclZigUP_CmdCallbacks = { zclZigUP_BasicResetCB、 //基本集群重置命令 zclZigUP_IdentifyCB, //标识命令 NULL, //确定触发效果命令 zclZigUP_IdentifyQueryRspCB, //识别查询响应命令 zclZigUP_OnOffCB, //开/关集群命令 NULL, //开/关集群增强型命令关闭,效果 为 NULL, //开/关集群增强命令开,调用全局场景 空, //开/关集群增强命令开,定时关 #ifdef ZCL_Groups NULL, //组响应命令 #endif #ifdef ZCL_Scenes NULL, //场景存储请求命令 NULL, //场景调用请求命令 NULL, //场景响应命令 #endif #ifdef ZCL_ALARMS NULL, //警报(响应)命令 #endif #ifdef SE_UK_EXT NULL、 //获取事件日志命令 NULL, //发布事件日志命令 #endif NULL, // RSSI 位置命令 NULL // RSSI 位置响应命令 }; 静态 zclLighting_AppCallbacks_t zclZigUP_LightingCmd = { NULL、 //移至 Hue 命令 NULL, //移动色调命令 NULL, // Step Hue 命令 NULL, //移至饱和命令 NULL, //移动饱和命令 NULL, //步长饱和命令 空, //移至 Hue 和 Saturation 命令 zclZigUP_MoveToColorCB, //移动到颜色命令 NULL, //移动颜色命令 NULL, //步骤到颜色命令 NULL, //移至色温命令 NULL, //增强移动到 Hue NULL, //增强型移动色调; NULL, //增强型步长色调; NULL、 //增强移动到色调和饱和度; NULL、 //颜色循环集命令 NULL, //停止移动步骤; }; 静态 zclClouresets_DoorLockAppCallbacks_t zclZigUP_DoorLockCmd 回调= { zclZigUP_DoorLockCB、 // Doorlock 群集命令 zclZigUP_DoorLockRspCB、 //门锁响应 NULL、 NULL、 NULL、 NULL、 NULL、 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空、 空、 空 空、 空、 空 }; /********* *@fn zclZigUP_Init * *@简介 zclGeneral 层的初始化函数。 * *@param 无 * *@返回 无 */ void zclZigUP_Init( byte task_id ) { // BindRestoreFromNV(); zclZigUP_TaskID = task_id; //将目标地址设置为间接 zclZigUP_DstAddr.addrMode =(afAddrMode_t) AddrNotPresent; zclZigUP_DstAddr.Endpoint = 0; zclZigUP_DstAddr.addr.shortAddr = 0; //此应用程序是家庭自动化配置文件 zclHA_Init(&zclZigUP_SimpleDesc[0])的一部分; //注册 ZCL 通用集群库回调函数 zclGeneral_RegisterCmdCallbacks( ZIGUP_endpoint,&zclZigUP_CmdCallbacks ); //注册 ZCL 照明集群库回调函数 zclLighting_RegisterCmdCallbacks( ZIGUP_endpoint,&zclZigCL_LightingCmdClockClockClockets ); / ZclockLock_CdoClockClockClockClockClockClockClockClockClock_ClockClockClockClockClockClockClockClockClockClock_Cbacks ) //注册应用程序的属性列表 zcl_registerAttrList( ZIGUP_EndPoint、zclZigUP_NumAttributes、zclZigUP_Attrs ); //注册应用程序以接收未处理的基础命令/响应消息 zcl_registerForMsg ( zclZigUP_TaskID ); #ifdef ZCL_discover// 注册应用程序的命令 list zcl_registerCmdList( ZIGUP_endpoint, zclCmdArraySize,zclZigcl_cmds ); #endif //注册所有关键事件-此应用程序将处理所有关键事件 RegisterForKeys ( zclZigUP_TaskID ); //为测试端点 afRegister (&ZigUP_TestEp)注册; #ifdef ZCL_diagnostic //注册应用程序的回调函数以读取/写入属性数据。 //仅当 ZCL 不知道属性数据格式时才需要此选项。 zcl_registerReadWriteCB( ZIGUP_Endpoint, zclDiagnostic_ReadWriteAttrCB, NULL ); if (zclDiagnostic_InitStats()=ZSuccessess) { //用户可以在此处启动计时器,将诊断保存为 nV } #endif P0SEL = b00001101; // 0=GPIO 1=外设(ADC、UART) P0DIR = b00001000; // 1=输出 P0INP = b00000001; // 1=无牵引 P1SEL = bq01000000; // 0=GPIO 1=外设(SPI) P1DIR = b01000110; // 1=输出 P1INP = b00000000; // 1=无牵引 P2SEL = b00000000; // 0=GPIO 1=外设、优先级 P2DIR = b00000000; // 1=输出、优先级 P2INP = b00000000; // 1=无牵引,端口 P0-P2全部上拉 PICTL |= BV (0)| BV (1)| BV (3); //下降沿 INT P0 (S0)+ P1.0-P1.3 (KEY)+ P2.0 (数字输入) IEN0 |= BV (7); // EA -全局中断使能 IEN1 |= BV (5); //端口0中断使能 IEN2 |= BV (1)| BV (4); //端口1+2中断使能 P0IEN |= BV (6); // S0 (P0.6)中断使能 P1IEN |= BV (3); //键(P1.3)中断使能 P2IEN |= BV (0); //拨入(P2.0)中断使能 PERCFG |= BV (1); // UART1 SPI 备用#2引脚 U1CSR = b00000000; // UART1 SPI 主 设备 U1GCR = b00010000; // UART1 Baud_E U1BAUD = b01000000; // UART1 Baud_M UART_Init(); _delay_ms (GetRandomNumber ());//随机延迟 //关闭 所有指示灯 Relais (0); WS2812_SendLED (0、0、0); LED (0); //通过"分配" NaN 使浮点值无效 //如果存在传感器,它们将在稍后填充 EXT_Temperature =*(float*)&float_NaN; EXT_湿度=*(float*)&float_NaN; ADC_Voltage =*(float*)&float_NaN; CPU_Temperature =*(float*)&float_NaN; //自动检测传感器类型 if (DHT22_measure()) { TEMP_SENSOR = 1; UART_String ("检测到传感器类型 DHT22。"); } 否则(ds18b20_get_temp () ){ TEMP_SENSOR = 2; UART_String ("检测到传感器类型 DS18B20); } else UART_String ("未检测到传感器。"); //开始测量任务以报告值 osal_start_reload 计时器(zclZigUP_TaskID、ZIGUP_reporting_EVT、ZIGUP_reporting_interval); UART_String ("初始化完成"); }/********* *@fn zclSample_event_loop * *@简短介绍 用于 zclGeneral 的事件循环处理器。 * *@param 无 * *@返回 无 */ uint16 zclZigUP_EVENT_LOOP (uint8 task_id、uint16事件) { afIncomingMSGPclack_t * MSGpkt; (void) task_id;//有意未引用的参数 if (Events & SYS_EVENT_MSG) { while (((MSGpkt=(afIncomingMSGPacket_t *) osal_msg_receive (zclZigUP_TaskID)))) { switch ( MSGpkt->HDR.event ) { 案例 ZCL_INVING_MSG: //传入的 ZCL Foundation 命令/响应消息 zclZigUP_ProcessIncomingMsg((zclIncomingMsg_t *)MSGpkt); 中断; 案例 ZDO_State_change: zclZigUP_NWkState =(devstates_t)(MSGpkt->HDR.status); //现在在网络上 if ((zclZigUP_NWkState =DEV_ZB_COord)||(zclZigUP_NWKState =DEV_router)||(zclZigUP_NWKState =DEV_END_DEVICE)) { //现在在网络 上} 中断; 默认值: 中断; } //释放内存 OSAL_msg_dealloc((uint8 *)MSGpkt); } //返回未处理的事件 返回(事件^ SYS_EVENT_MSG); } if (Events & ZIGUP_identify_timeout_EVT) { if (zclZigUP_IdentifyTime >0) zclZigUP_IdentifyTime --; zclZigUP_ProcessIdentifyTimeChange(); 返回(事件^ ZIGUP_Identifying_TIMEOUT_EVT); } if (Events & ZIGUP_Reporting_EVT) { //更新测量值 measure_QuickStudioff(); measure_Sensor(); //报告状态 zclZigUP_Reporting (report_reason_timer); 返回(事件^ ZIGUP_REGISY_EVT); } //丢弃未知事件 返回0; }/ ********* *@fn zclZigUP_ProcessIdentifyTimeChange * *@简短调用以处理对 IdentifyTime 属性的任何更改。 * *@param none * *@return none */ static void zclZigUP_ProcessIdentifyTimeChange (void) { if (zclZigUP_IdentifyTime >0) { OSAL_start_timerEx (zclZigUP_TaskID、ZIGUP_Identifying_TIMEOUT_EVT、1000); // HalLedBlink (HAL_LED_4、0xFF、HAL_LED_DEFAULT_DUTY、HAL_LED_DEFAULT_TIMER); } 否则 { OSAL_STOP_timerEx (zclZigUP_TaskID、ZIGUP_Identifying_TIMEOUT_EVT); } /********* *@fn zclZigUP_BasicResetCB * *@ZCL 通用集群库的简短回调 * 将所有基本群集属性设置为默认值。 * *@param none * @return none */ static void zclZigUP_BasicResetCB( void ) {nLLME_LEaveReq_t leaveReq; //将每个字段设置为0 osal_memset (&leaveReq,0,sizeof (nLLME_LEaveReq_t)); //这将使设备在重置后重新加入网络。 leaveReq.inu返回= true; //设置 NV 启动选项以强制"新建"加入。 zgWriteStartupOptions (ZG_STARTUP_SET、ZCD_STARTOPT_DEFAULT_NETWORK_STATE); //离开网络,如果 (NLME_LeaveReq (&leaveReq)!= ZSuccessess) {则在之后重置 //无法发出离开;无论如何都要准备重置 ZDUP_LEAVeReset (false); } /********* *@fn zclZigUP_IdentifyCB * *@当 *时从 ZCL 通用群集库进行简短回调 它收到了此应用程序的 Identity Command。 * *@param srcAddr -响应消息的源地址和端点 *@param identifyTime -标识自己的秒数 * @return none */ static void zclZigUP_IdentifyCB( zclIdentify_t *pcmd ) {zcl****IdentifyTime = pCmd->Zigbe_IdentifyCB(*zclIdentifyTimeChange_Time) *@fn zclZigUP_IdentifyQueryRspCB * @*时 ZCL 通用集群库的简短回调 它收到了此应用程序的 Identity Query 响应命令。 * **@param srcAddr -请求者的地址 *@param timeout -标识自己的秒数(对查询响应有效) * *@返回无 */ 静态空 zclZigUP_IdentifyQueryRspCB( zclIdentifyQueryRsp_t ******) { (空) ;}/****CODEPRSP * *@fn zclZigUP_OnOffCB * @*时 ZCL 通用集群库中的简短回调 它收到了此应用程序的开/关命令。 * *@param cmd - command_on、command_off 或 command_toggle * *@return none */ static void zclZigUP_OnOffCB (uint8 cmd) { afIncomingMSGPgpgp_t* pptr = zcl_getRawAFMsg ();zclZigbed_dstAddr.addr.Adr.Adr.portr = zclrAddr.Addr.Adr<pAdr<pAdr.Adr<paddr<paddr<p<p char buffer[100]; sprintf (buffer、"cmd:%u\n"、cmd); uart_String (buffer); //如果 (cmd == command_on) {,则打开指示灯 Relais (light_on); } //如果 (cmd = command_off) 为{,则关闭其他灯 Relais (light_off); } //如果 (cmd = COMMAND_TOGGLE) 为{,则切换其他灯 Relais (!State_Light); } ZStatus_t zclZigUP_MoveToColorCB (zclCCMoveToColor_t *pCmd) { //将 CIE 颜色空间转换为 RGB 颜色空间 //来自 github.com/.../cie_rgb_converter.js char buffer[100]; sprintf (buffer、"Light-CMD:x:%u // y:%u\n"、pcmd->colorX、pcmd->colorY); UART_String (buffer); float x = pcmd->colorX/65536.0;//给定的 x 值 y = p65md /给定的 float 6.0/p65md 值 y float z = 1.0 - x - y; float Y = 1.0; float X =(Y / y)* x; float Z =(Y / y)* z; //使用宽 RGB D65转换浮 点红色= X * 1.656492 - Y * 0.354851 - Z * 0.255038; 浮点绿色=-X * 0.707196 + Y * 1.655397 + Z * 0.036152; 浮点蓝色= X * 0.051713 - Y * 0.121364 + Z * 1.011530; //如果红色、绿色或蓝色大于1.0,则将其设置回1.0的最大值 (如果(红色>蓝色&&红色>绿色&&红色> 1.0) { 绿色=绿色/红色; 蓝色=蓝色/红色; 红色= 1.0; } 否则(绿色>蓝色&&绿色>红色&&绿色> 1.0) { 红色=红色/绿色; 蓝色=蓝色/绿色; 绿色= 1.0; } 否则(蓝色>红色&&蓝色>绿色&&蓝色> 1.0) { 红色=红色/蓝色; 绿色=绿色/蓝色; 蓝色= 1.0; } //反向伽马校正 红色=红色<= 0.0031308? 12.92 *红色:(1.0 + 0.055)* pow (红色,(1.0 / 2.4))- 0.055; 绿色=绿色<= 0.0031308? 12.92 *绿色:(1.0 + 0.055)*低(绿色、(1.0 / 2.4))- 0.055; 蓝色=蓝色<= 0.0031308? 12.92 *蓝色:(1.0 + 0.055)*低(蓝色、(1.0 / 2.4))- 0.055; //将标准化十进制转换 为十进制红色*= 255; 绿色*= 255; 蓝色*= 255; uint8 r =(uint8)红色; uint8 g =(uint8)绿色; uint8 b =(uint8)蓝色; 如果(红色>254.5) r = 255; 否则(红色<0.5) r = 0; 如果(绿色>254.5); 否则、如果(绿色< 0.5) g = 0; 如果(蓝色> 254.5) b = 255; 否则(蓝色< 0.5) b = 0; sprintf (buffer、"Light-CMD:R:%u // g:%u // b:%u\n"、r、g、b); UART_String (buffer); WS2812_SendLED (r、g、b); 退货(ZSuccessess); } /********* *@fn zclZigUP_DoorLockCB * *@当 *时从 ZCL 通用群集库进行简短回调 它收到了此应用程序的门锁群集命令。 * *@param pInMsg -处理传入消息 *@param pInCmd - PIN/RFID 命令代码 * *@return ZStatus_t */ static ZStatus_t zclZigUP_DoorLockCB (zclIncoming_t *pInMsg,zclDoorLock_t *pInCmd){/=static Zclock_DoorLocks= hdr.commandID (=Door_Off)命令(=Door_Door_Clock) LED (0); zclClourese_SendDoorLockStatusResponse (pInMsg->msg->endpoint、&pInMsg->msg->srcAddr、command_closes_lock_door、ZCL_STATUS_SUCCESS、true、true、 pInMsg->HDR.transSeqNum ); } // LED 打开-如果 (pInMsg->hdr.commandID == COMMAND_FLOCK_UNLOCK_DOOR) {,则解锁门 LED (1); zclClourese_SendDoorLockStatusResponse (pInMsg->msg->endpoint、&pInMsg->msg->srcAddr、command_closes_unlock_door、ZCL_STATUS_SUCCESS、true、true、 pInMsg->HDR.transSeqNum ); } //如果 (pInMsg->hdr.commandID == command_offsets_toggle_door) {,则切换门 LED (!State_LED); zclClourese_SendDoorLockStatusResponse (pInMsg->msg->endpoint、&pInMsg->msg->srcAddr、command_closes_tog_door、ZCL_STATUS_SUCCESS、true、true、 pInMsg->HDR.transSeqNum ); } 否则 { 返回(ZCL_STATUS_FAILURE);//无效命令 } 返回(ZCL_STATUS_CMD_has _RSP); } /********* *@fn zclZigUP_DoorLockRspCB * *@当 *时从 ZCL 通用群集库进行简短回调 它收到了针对此应用的门锁响应。 * *@param cmd - Command ID *@param srcAddr - Requestor 的地址 *@param trasSeqNum -事务序列号 *@param 状态-来自服务器门锁的状态响应 cmd * *@return ZStatus_t */ static ZStatus_t zclZigUP_DoorLockRspCB (zclInforecing_t *), 返回状态8 * ( ZCL_STATUS_SUCCESS ); }/********* * 处理 ZCL Foundation 传入命令/响应消息的函 数* / /********* *@fn zclZigUP_ProcessIncomingMsg * *@简短处理 ZCL Foundation 传入消息 * @param pInMsg -指向已接收消息的指针 * *@返回 none */ static void zclZigUP_ProcessIncomingMsg ( zclIncomingMsg_t *pInMsg ) { switch ( pInMsg->zclHdr.commandID ) zcl_read_zcl_cl_rif_rq_de: zclZigUP_ProcessInReadRspCmd ( pInMsg ); break; #endif #ifdef ZCL_WRITE case ZCL_CMD_WRITE_RSP: zclZigUP_ProcessInWriteRspCmd ( pInMsg ); break; #endif #ifdef ZCL_report //应在此处添加属性报告实现 方案案例 ZCL_CMD_CONFIG_REPORT: // zclZigUP_ProcessInConfigReportCmd ( pInMsg ); 中断; 案例 ZCL_CMD_CONFIG_REPORT_RSP: // zclZigUP_ProcessInConfigReportRspCmd (pInMsg); 中断; 案例 ZCL_CMD_READ_REPORT_CFG: // zclZigUP_ProcessInReadReportCfgCmd (pInMsg); 中断; 案例 ZCL_CMD_READ_REPORT_CFG_RSP: // zclZigUP_ProcessInReadReportCfgRspCmd (pInMsg); 中断; 案例 ZCL_CMD_REPORT: // zclZigUP_ProcessInReportCmd (pInMsg); break; #endif case ZCL_CMD_DEFAULT_RSP: zclZigUP_ProcessInDefaultRspCmd ( pInMsg ); break; #ifdef ZCL_discover case ZCL_CMD_discover_CMDS_received_RSP: zclZigUP_ProcessInDiscCmdsRspCmd (pInMsg); 中断; 案例 ZCL_CMD_discover_CMDS_GEN_RSP: zclZigUP_ProcessInDiscCmdsRspCmd (pInMsg); 中断; 案例 ZCL_CMD_discover_ATTRS_RSP: zclZigUP_ProcessInDiscAttrsRspCmd (pInMsg); 中断; 案例 ZCL_CMD_discover_ATTRS_EXT_RSP: zclZigUP_ProcessInDiscAttrsExtRspCmd (pInMsg); break; #endif 默认值: 中断; } if (pInMsg->attrCmd) osal_mem_free (pInMsg->attrCmd); } #ifdef ZCL_read /********* *@fn zclZigUP_ProcessInReadRspCmd * *@简要处理"配置文件"读取响应命令 * *@param pInMsg -要处理的传入消息 * @返回 none */ static uint8 zclZigUP_ProcessInReadRspCmd ( zclIncomingMsg_t *pInMsg ){zclCint8 zcl_ProcessInReadRspmd ( zclInReadMsp_t *zclInReadRspmd;* readRspCmd =(zclReadRspCmd_t *) pInMsg->attrCmd; for (i = 0;i < readRspCmd->numAttr;i++) { //将原始读取属性的结果通知发起人 //尝试,对于每个成功的请求,请求的值 //属性 } return (true); } #endif // ZCL_read #ifdef ZCL_write /********* *@fn zclZigUP_ProcessInWriteRspCmd * *@简要处理“配置文件”写入响应命令 * *@param pInMsg -要处理的传入消息 * @返回无* / 静态 uint8 zclZigUP_ProcessInWriteRspCmd (zclIncomingMsg_t *pInMsg){*zclZigUP_ProcessInWriteRspmd (zclInCmd *zclInWriteRsp_t *Cd_t *zclCd_RspeRd; writeRspCmd =(zclWriteRspCmd_t *)pInMsg->attrCmd; for ( i = 0;i < writeRspCmd->numAttr;i++) { //将原始写入属性的结果通知器件 //命令 。} return (true); } #endif // ZCL_write /********* *@fn zclZigUP_ProcessInDefaultRspCmd * *@简要处理"配置文件"默认响应命令 * *@param pInMsg -要处理的传入消息 * @return none */ static uint8 zclZigUP_ProcessInDefaultRspCmd ( zclIncomingMsg_t *pInMsg ){// zclD_defaultRspmd = zclCspmd //设备收到默认响应命令通知。 (空) pInMsg; 返回(true); } #ifdef ZCL_discover/********* *@fn zclZigUP_ProcessInDiscCmdsRspCmd * @简要处理 Discover 命令响应命令 * @param pInMsg -要处理的传入消息 * @return none */ static uint8 zclZigUP_ProcessInDiscCmdsRspCmd (zclIncomingMsg_t *pInsint 8) zclZigbe_ProcessIndiscoverCmd ( zclCspCspCspCspCspCmCmd) discoverRspCmd =(zclDiscoverCmdsCmdRsp_t *)pInMsg->attrCmd; for ( i = 0;i < discoverRspCmd->numCmd;i++) { //设备收到其属性查找命令结果的通知 。} 返回(TRUE); } /********* *@fn zclZigUP_ProcessInDiscAttrsRspCmd * *@简要处理"配置文件"发现属性响应命令 * @param pInMsg -要处理的传入消息 * @return none */ static uint8 zclZigUP_ProcessInDiscAttrsRspCmd (zclIncomingMsg_t )* zclInt 8 zclZiguint_ProcessIndiscover_DissAttrsRspCmd * discoverRspCmd =(zclDiscoverAttrsRspCmd_t *) pInMsg->attrCmd; for (i = 0;i < discoverRspCmd->numAttr;i++) { //设备收到其属性查找命令结果的通知 。} 返回(TRUE); } /********* *@fn zclZigUP_ProcessInDiscAttrsExtRspCmd * *@简要处理“配置文件”发现属性扩展响应命令 * *@param pInMsg -要处理的传入消息 * @return none */ static uint8 zclZigboverUP_ProcessInDiscsExtRspCmd (zclIningInsMsinc8)*静态 uint8 zclZigbdiscover_ProcessIndiscover_ProcessInscdr * discoverRspCmd =(zclDiscoverAttrsExtRsp_t *) pInMsg->atttrCmd; for (i = 0;i < discoverRspCmd->numAttr;i++) { //设备收到其属性查找命令结果的通知 。} return (true); } #endif // ZCL_discover
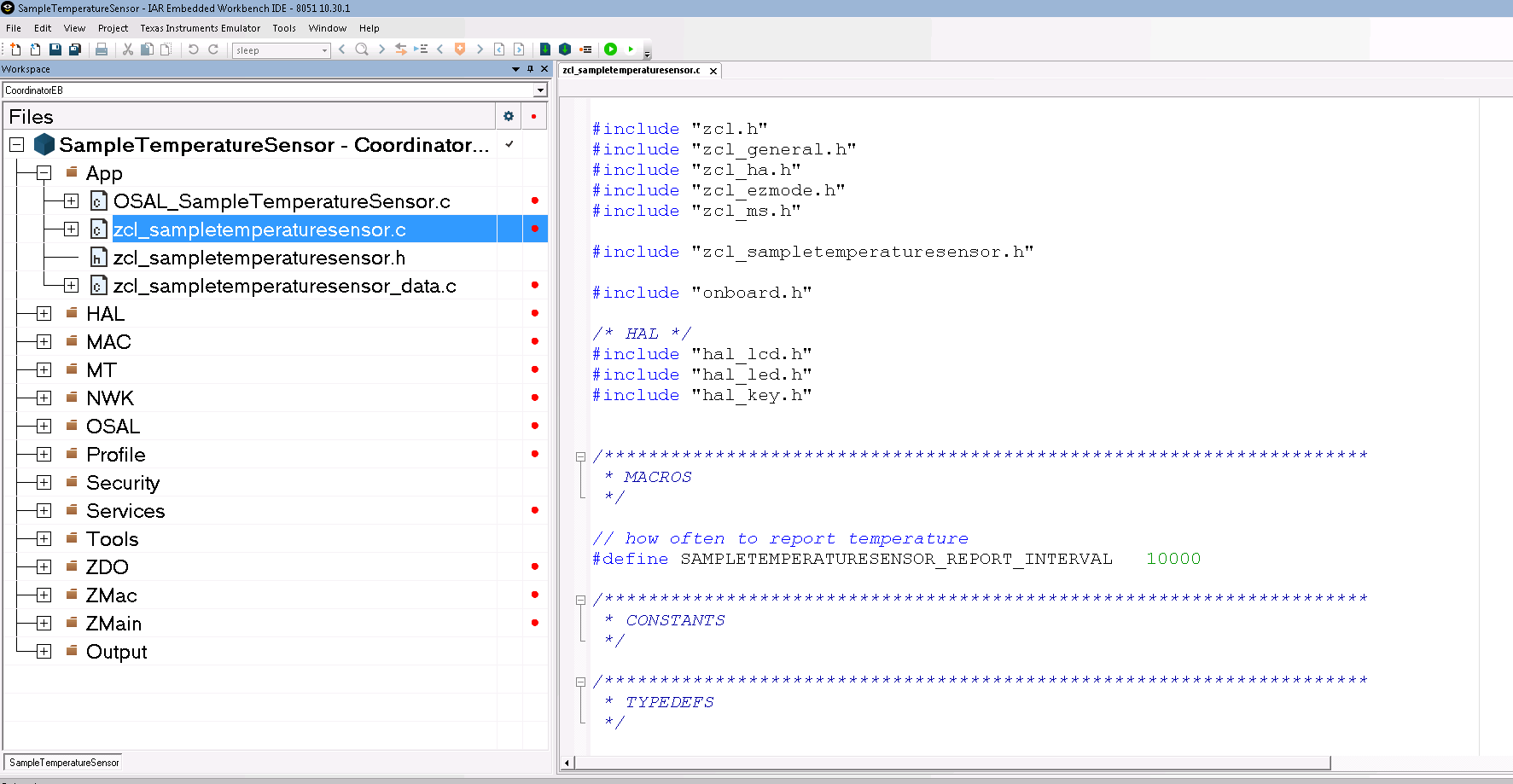
我建议您参考 SampleTemperatureSensor 示例。
很抱歉,我没有找到任何关于睡眠模式的信息。 :-)
我在 zcl_sampletemperaturesensor.c 中搜索
您应该切换到 EndDeviceEB 并搜索 power_saving。
很抱歉,但我没有找到:-(
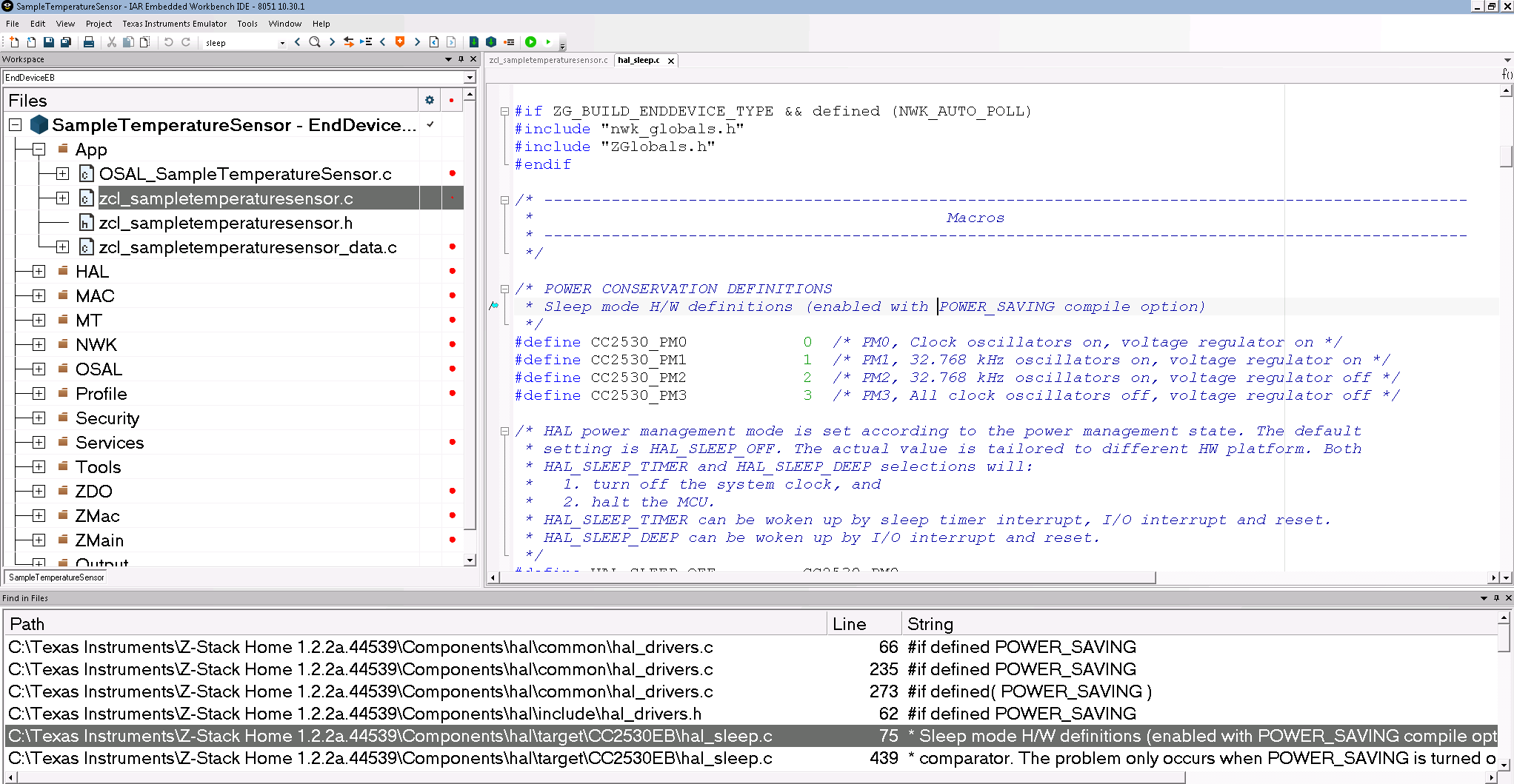
尝试文件搜索(shift-ctrl-f)。
您还可以检查 hal_sleep.c 以查看器件如何进入睡眠模式。
如何启用 power_saving? 睡眠时间是在哪里设置的?
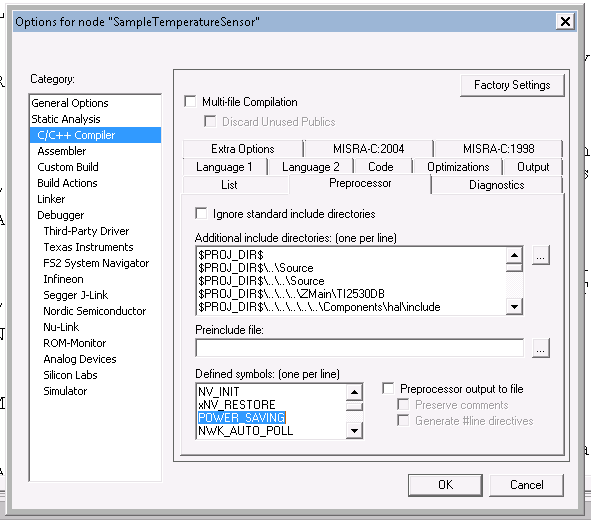
您可以在项目预定义符号中定义 power_saving 以启用它。 定义 power_saving 后,当任务队列中没有内容时,CC2530将自动进入睡眠模式。
那么?
启用编译选项、在行的左边选择"x"。
和
器件唤醒多长时间? 10、000? 在 REPORT_INTERVAL = 10000中定义?
zcl_sampletemperatures.c
//报告温度 的频率#define SAMPLETEMPERATURESENSOR_REPORT_INTERVAL 10000
这以 ms 为单位、因此10000 =10秒。
是的、 您可以在行的左边选择"x"以启用编译选项。 除报告间隔外、轮询速率默认每秒唤醒一次器件。
如何禁用或更改轮询速率时间?
您可以通过在 f8wconfig.cfg 中更改-DPOLL_RATE 来更改轮询速率。
我改变了
-DPOLL_RATE = 10000
但我的测试仪显示始终为27mA :-)
您是使用 TI CC2530DK 还是使用定制板?
我使用 了 CC2530
[引用 user6111566"]
-DPOLL_RATE=10000
[/报价]
D3 LED 始终亮起、D1闪烁。 SS2530可能没有设置睡眠模式?
我认为这不是 TI CC2530DK,如果始终亮起且另一个 LED 闪烁,则可能会导致27mA 的电流消耗。 您应该先关闭这两个 LED。
我使用该 板。
当我测量电流时、我断开了 SS2530和电路板。
SS2530可能没有设置睡眠模式?
我不知道此板,但您应该检查您的板原理图并设置代码关闭 LED 以再次测量功耗。
当我测量电流时、我根本没有使用电路板。 但 模块上没有 LED。
非常感谢。
睡眠模式的工作电流为1uA。 :-) 我需要将 CC2530模块带到路由器以连接到网络。
感谢您分享您解决问题的方式。
这是一个已知问题、已针对 Z-Stack 3.0.2修复: http://processors.wiki.ti.com/index.php/Zigbee_Known_Issues_and_Proposed_Fixes#Low_power_mode_not_entered_upon_ZED_factory_new_before_commissioning