If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
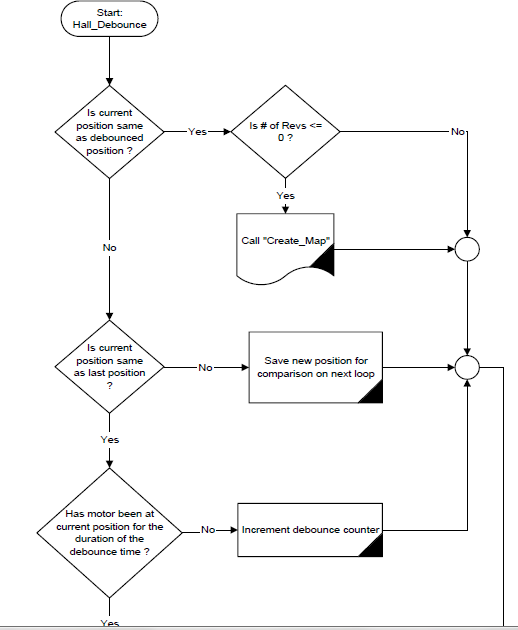
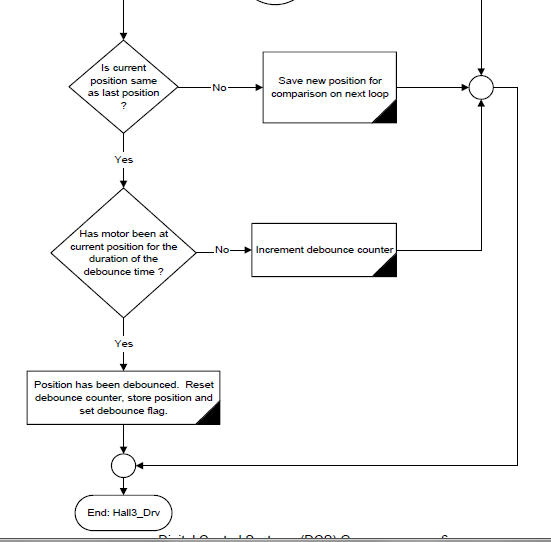
if (p->HallGpio == p->HallGpioAccepted) // GPIO_UNCHANGED: 没变Current GPIO reading == debounced GPIO reading? { if (p->Revolutions <= 0) // Only create hall map during initial Revolutions F281X_EV1_HALL3_Create_Map(p); p->StallCount -= 1; // Decrement stall counter if (p->StallCount == 0) { p->EdgeDebounced = 0x7FFF; // If motor has stalled, then user trigger to commutate p->StallCount = 0xFFFF; // Reset counter to starting value } } else // GPIO_CHANGED: If not zero, then the motor has moved to a new position. { if (p->HallGpio == p->HallGpioBuffer) // Current GPIO reading == previous GPIO reading? { if (p->DebounceCount >= p->DebounceAmount) // If equal, is current GPIO reading debounced? { p->HallGpioAccepted = p->HallGpioBuffer; // Current GPIO reading is now debounced,当前位置已经去抖 p->EdgeDebounced = 0x7FFF; // Edge/position debounced, trigger commutation
p->DebounceCount = 0; // Reset debounce counter
if (p->HallMapPointer==0) p->Revolutions += 1; // Increment on every rev (HallMapPointer = 0) } else // DEBOUNCE_MORE p->DebounceCount += 1; // Increment debounce counter } else // NEW_READING { p->HallGpioBuffer = p->HallGpio; // Save new reading and reset debounce counter p->DebounceCount = 0; } } }