Part Number: TMS320F28P650DK
近期想在28p65上使用DCL_NLPID_C3做永磁同步电机的三环FOC控制。
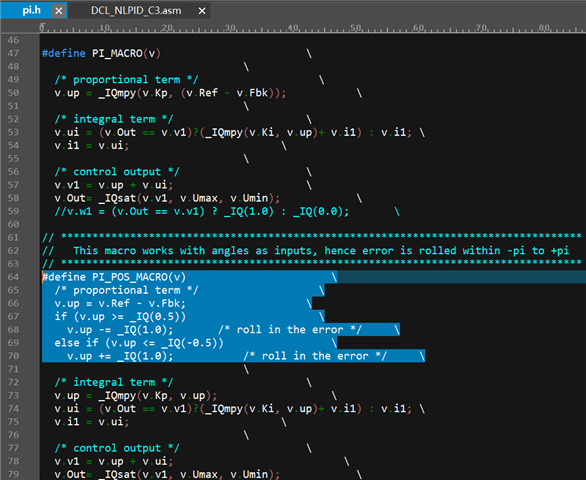
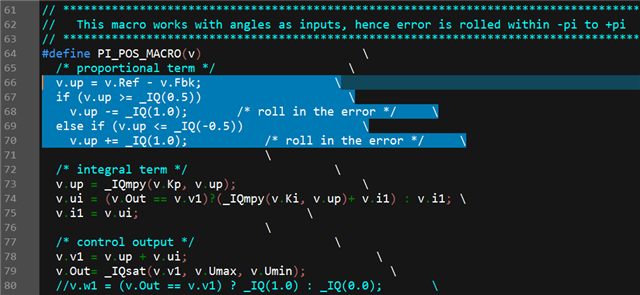
如上图所示,为controlsuit中的PI_MACRO及PI_POS_MACRO,这两个函数也是我一直在使用的,可以看到,对于位置环的控制,PI_POS_MACRO函数中增加了高亮部分的“roll in the error”。
我在使用28335做控制的时候,使用过DCL_NLPID_C2。
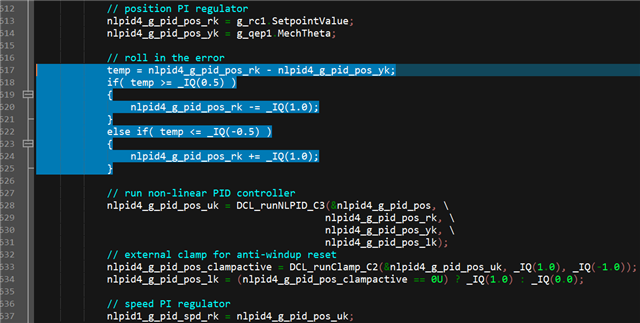
DCL_NLPID_C2中没有类似的“roll in the error”处理,导致位置控制异常,我修改了DCL_NLPID.h中的代码,增加了“roll in the error”处理后位置控制就正常了。
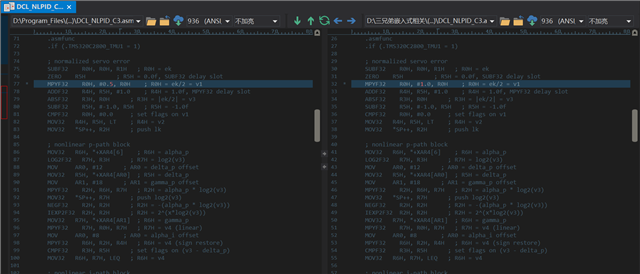
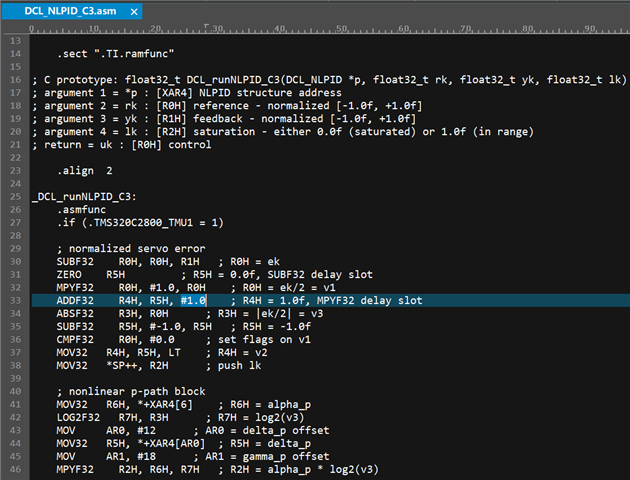
最近要使用的DCL_NLPID_C3为汇编语言编写,我不知道怎么增加“roll in the error”这部分汇编语言代码,请问有工程师使用过DCL_NLPID_C3做位置环控制码?你们是怎么解决“roll in the error”的呢?
官方可以把“roll in the error”这部分代码添加到你们提供的DCL_NLPID_C3汇编语言文件中吗?
就像PI_MACRO有对应的PI_POS_MACRO,DCL_NLPID_C3是不是也应该有对应的DCL_NLPID_C3_POS。