

Part Number: TMS320F280039C
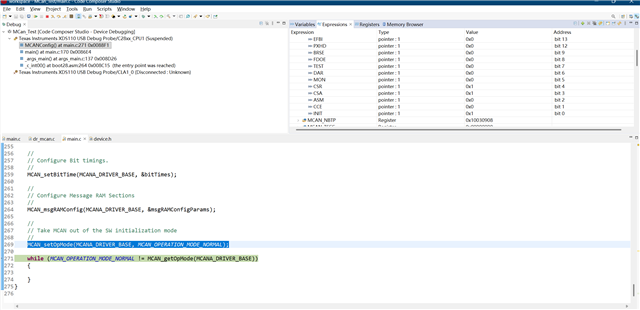
Using the LAUNCHXL_280039C development board, the 280039C/MCAN example (mcan_ex7_classic_transmit) is builded, the CAN message cannot be sent. MCAN_TXBRP.TRP0 always 1, and MCAN_CCCR.INIT = 1. The line of code below cannot change the INIT state.
MCAN_setOpMode(MCANA_DRIVER_BASE, MCAN_OPERATION_MODE_NORMAL);
I have met similar examples, and their solution is to connect to a CAN transceiver. But, I can send data without a transceiver when configuring the CAN driver.

