各位大神,我用的TI官方例程有两个问题:
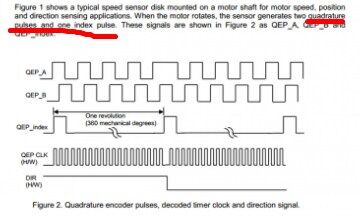
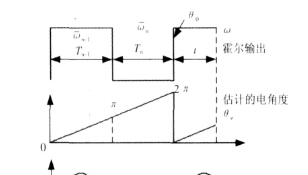
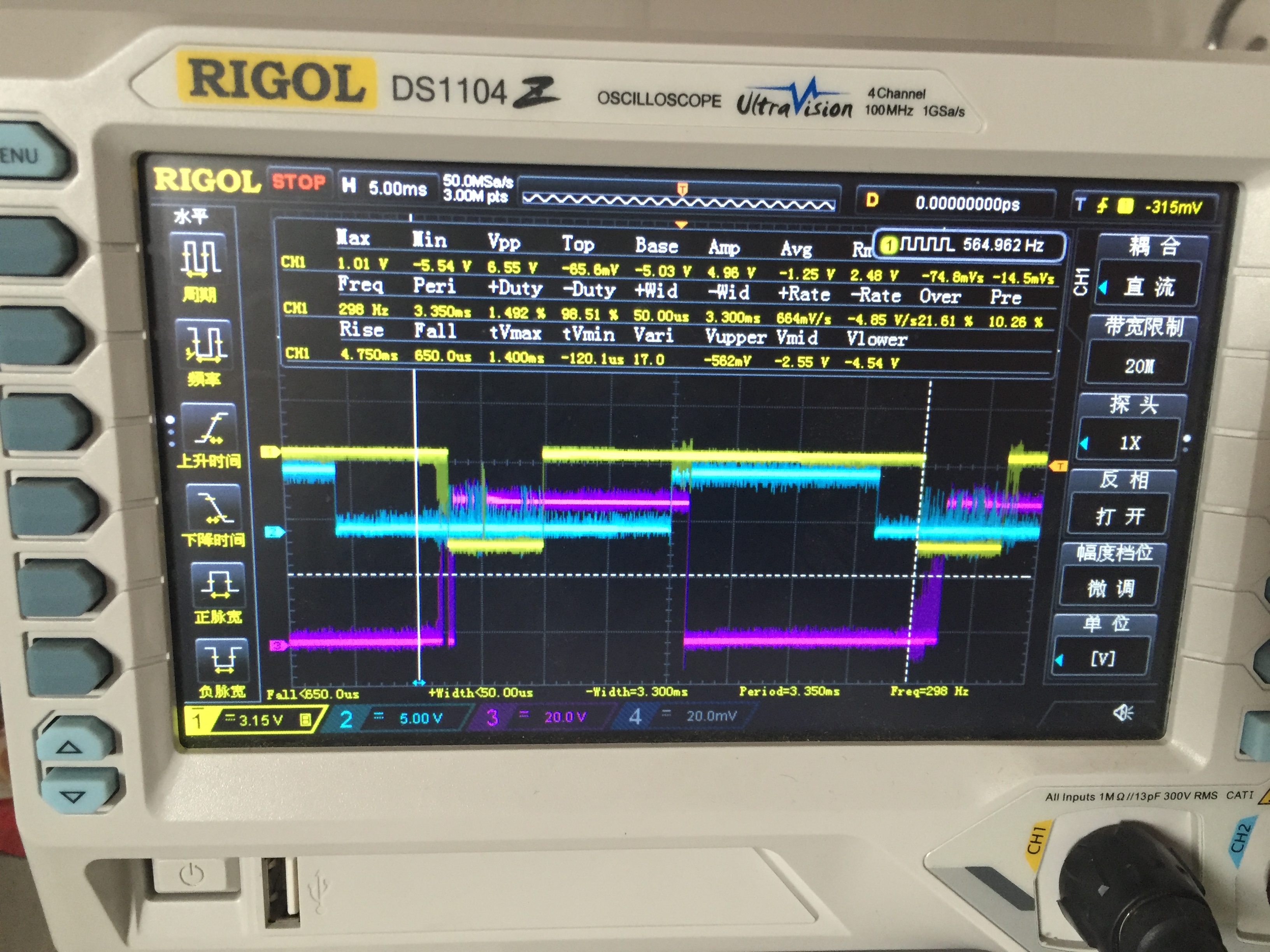
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!