

Part Number: TMS320F2800137
Why is the performance of the system after re-starting not as good as when it was directly run after the motor parameters were fixed? It seems that running the system directly after motor identification is more effective.Now I will demonstrate my operation.
The level I'm running is level4, set userParams_M1.flag_bypassMotorId =false; flagEnableMotorIdentify = 1; flagEnableRunAndIdentify = 1; Wait for the identification to be completed. Insert the recognition results into the user_common.h file. The changes are made to the following four parameters.
USER_MOTOR1_Rs_Ohm\ USER_MOTOR1_Ls_d_H\ USER_MOTOR1_Ls_q_H \ USER_MOTOR1_RATED_FLUX_VpHz.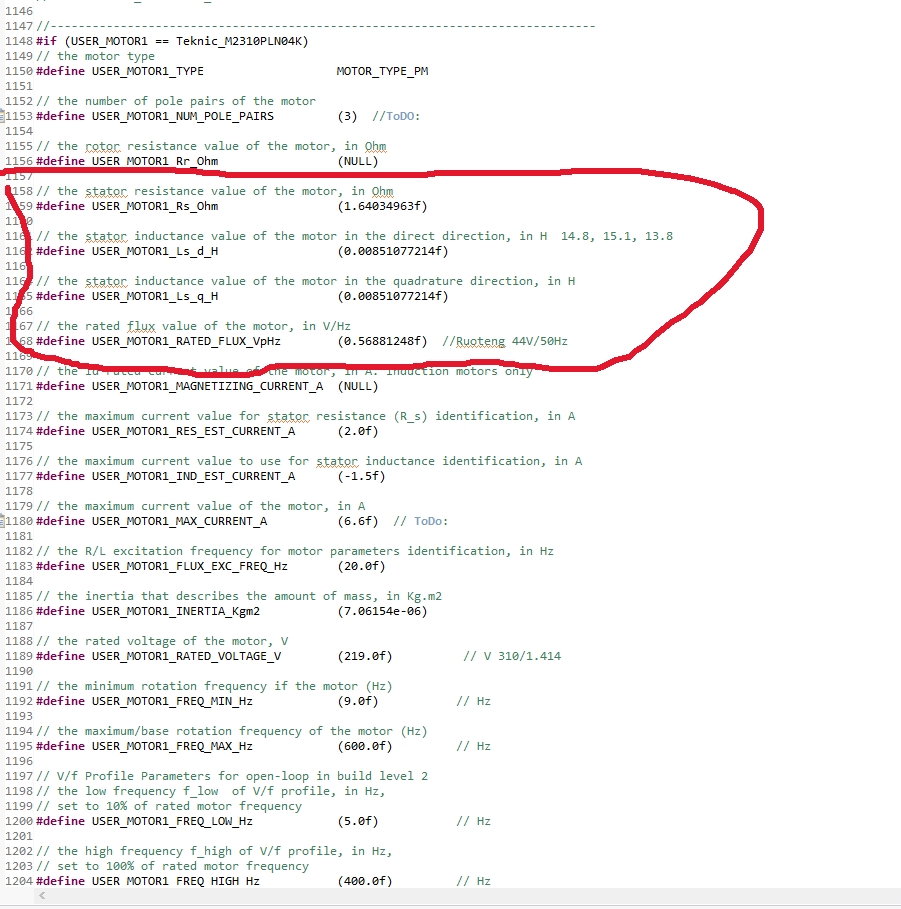
Then modify userParams_M1.flag_bypassMotorId = true; Re-download the program, flagEnableRunAndIdentify = 1;
However, it was actually discovered that the performance of the motor was not satisfactory. After multiple comparisons, the result was not as good as directly starting the machine after its recognition was completed.I would like to ask, is it because the parameters I entered were insufficient, or do I need to perform some other operation for the parameters to be fixed?
Thank you very much for your reply.
