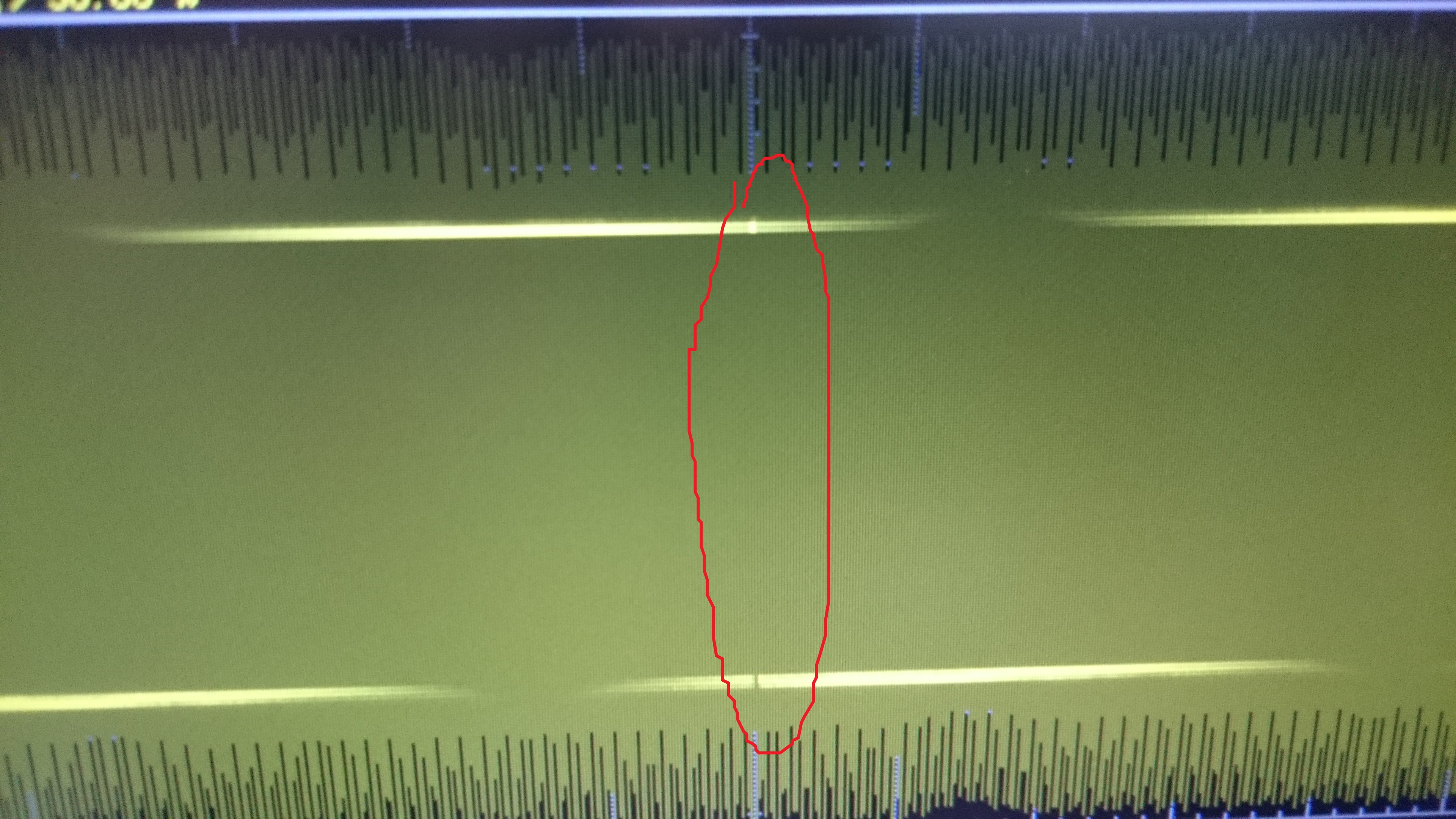
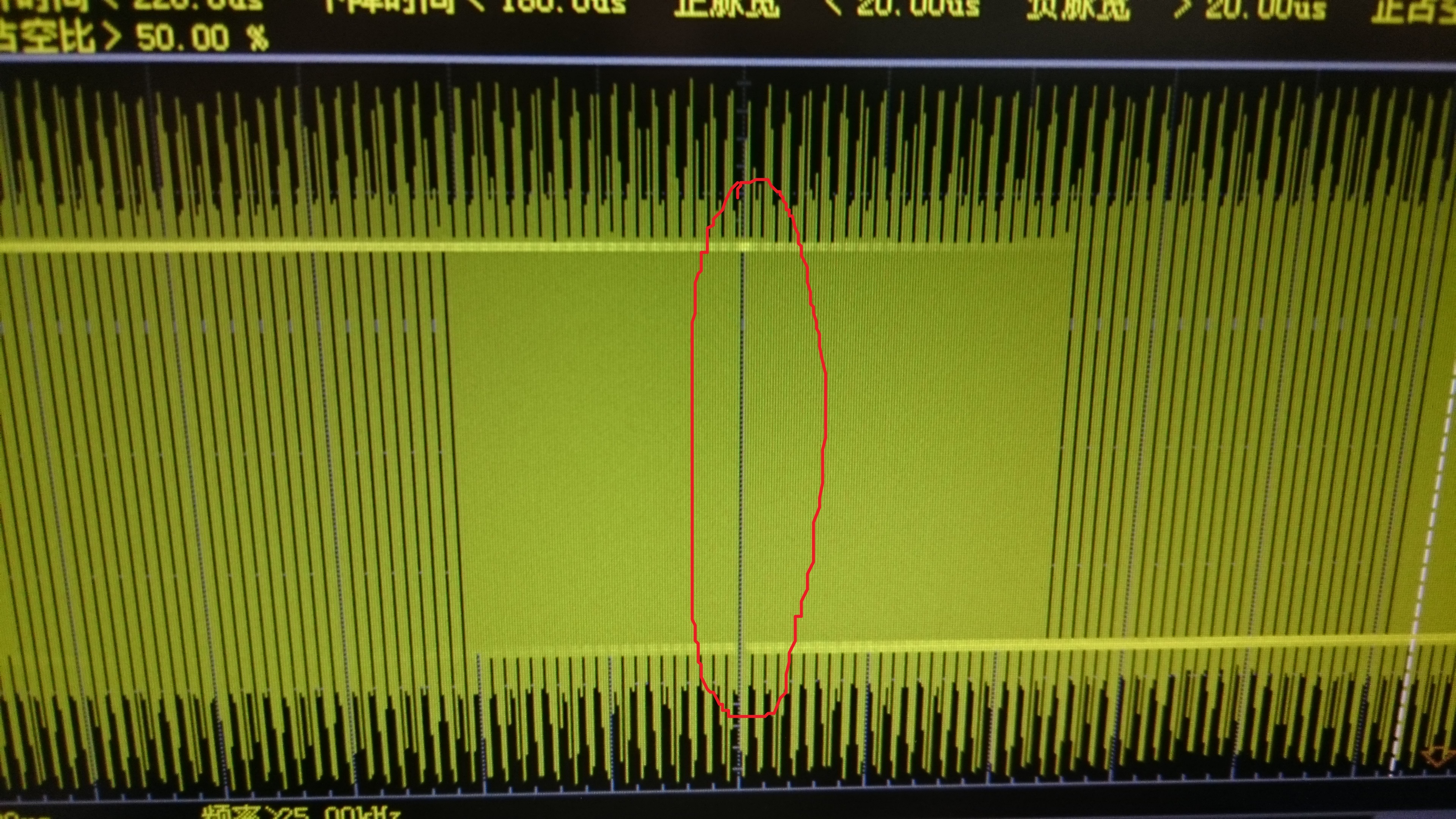
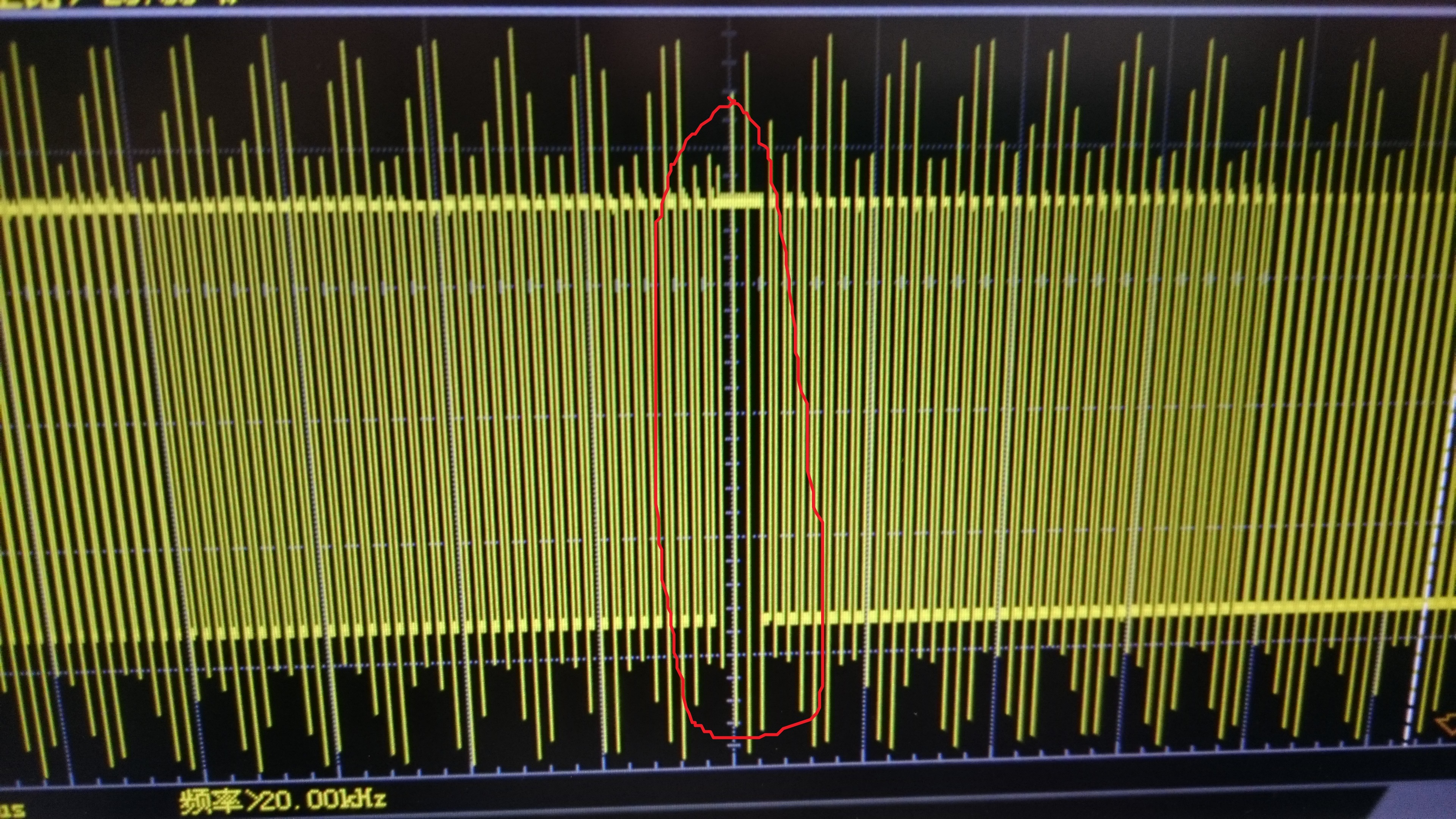
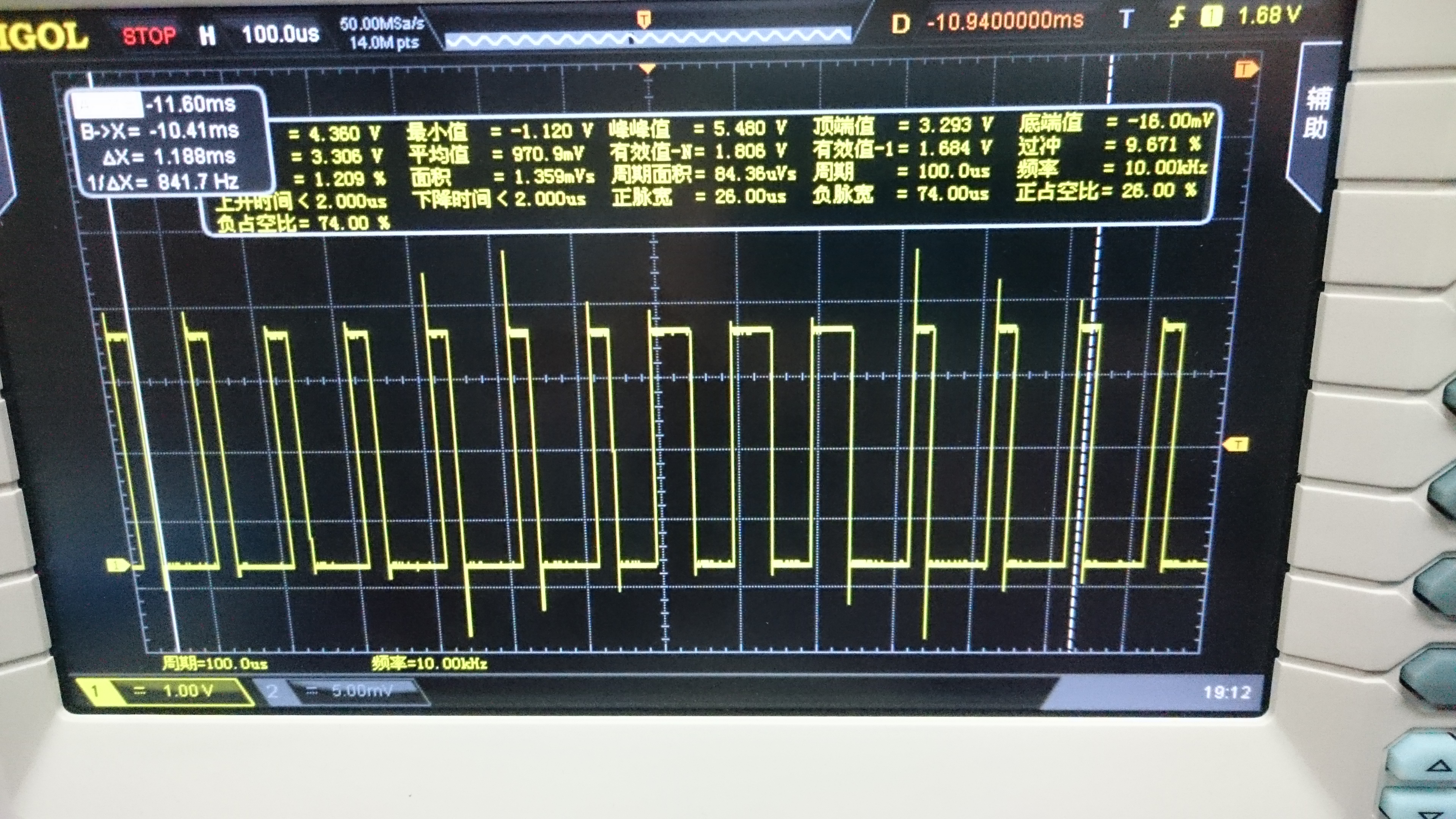
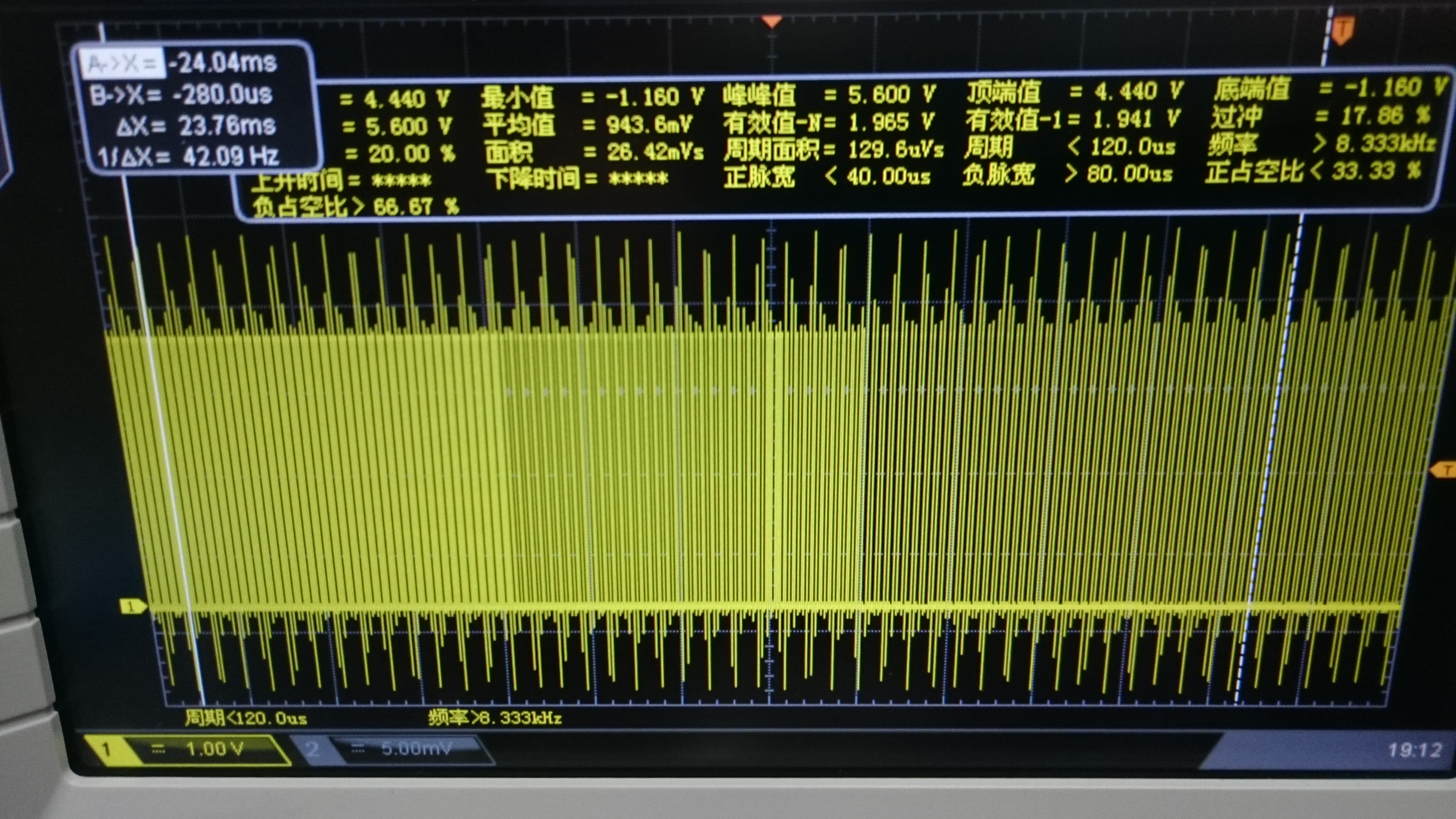
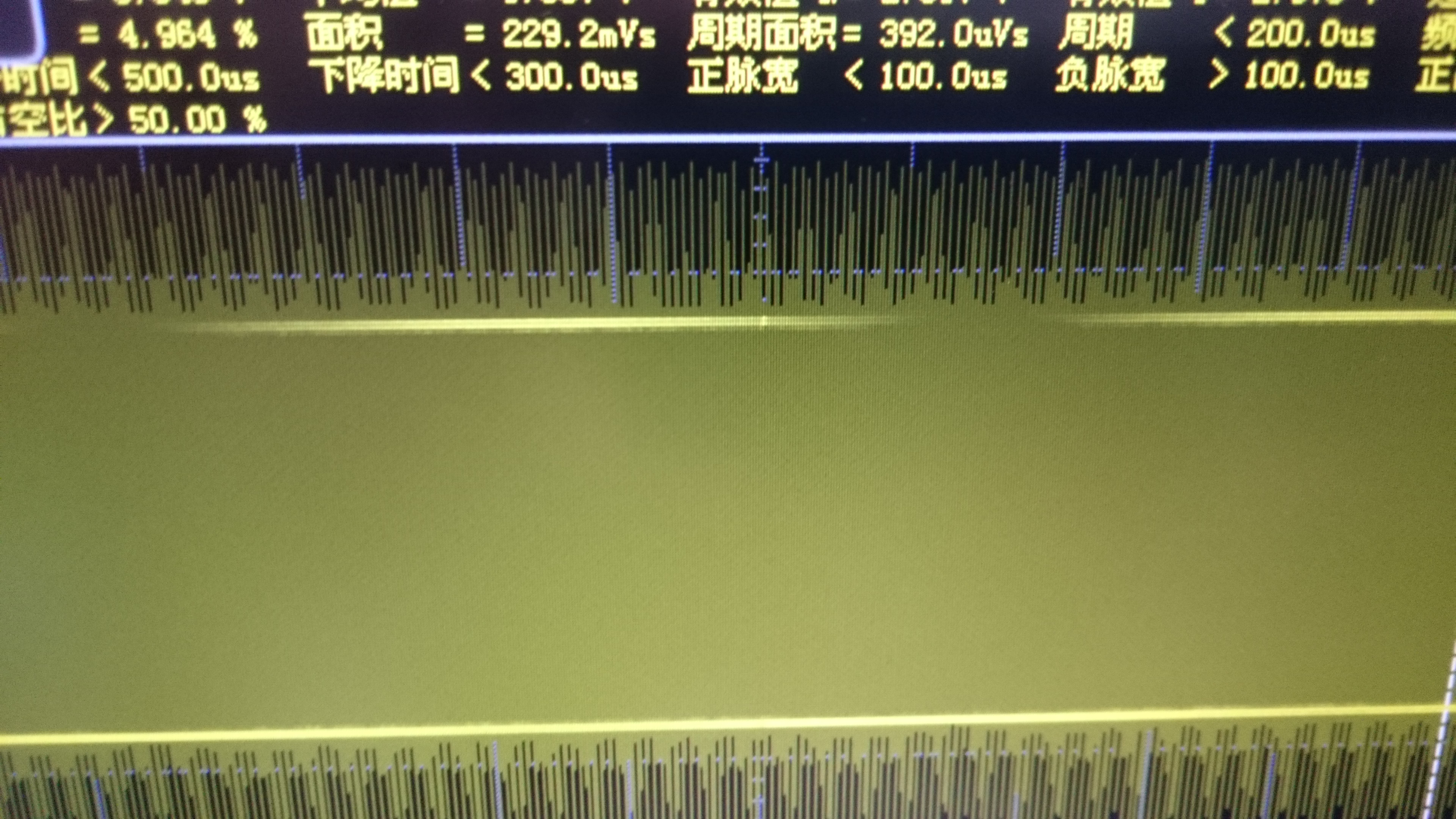
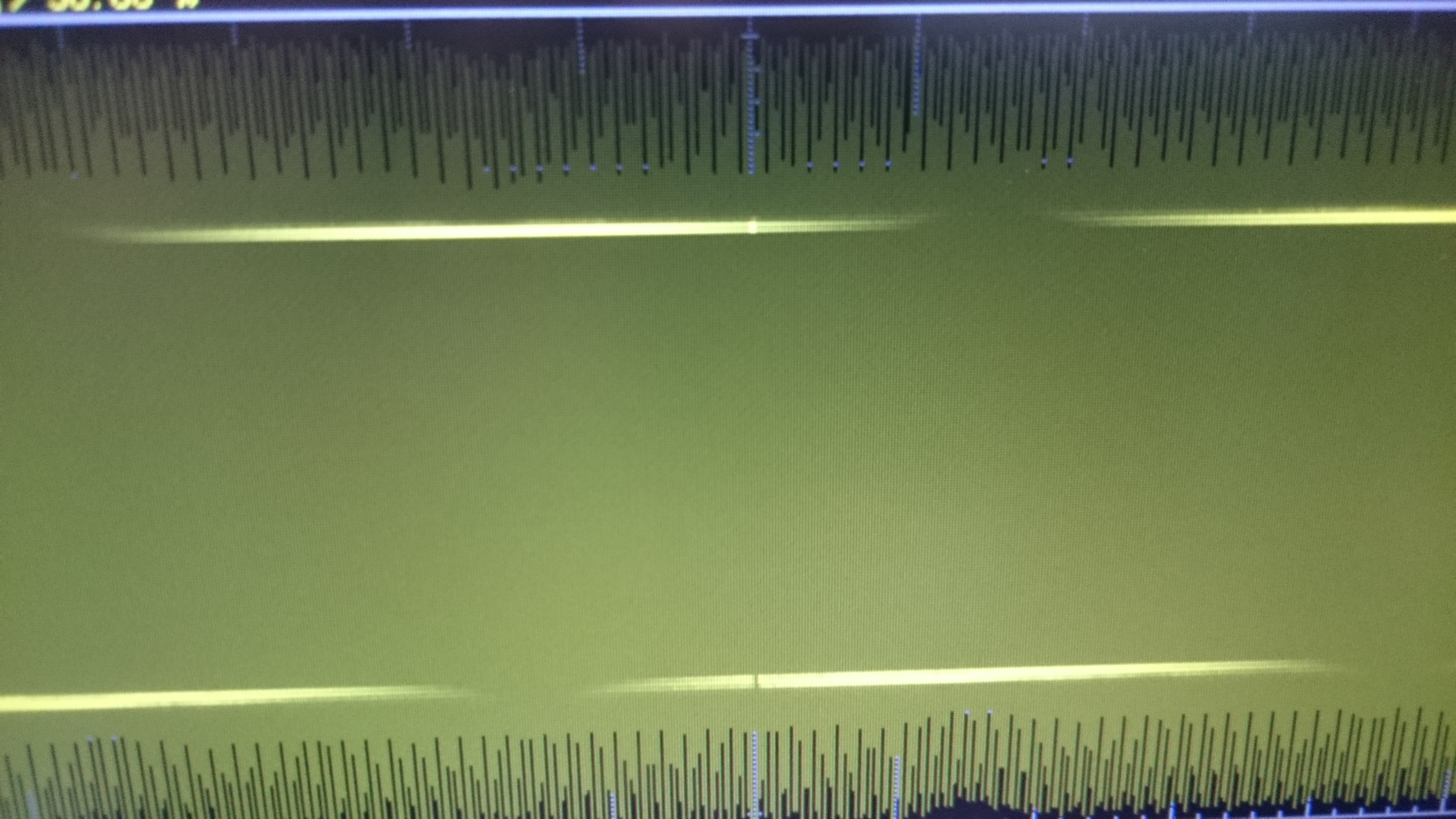
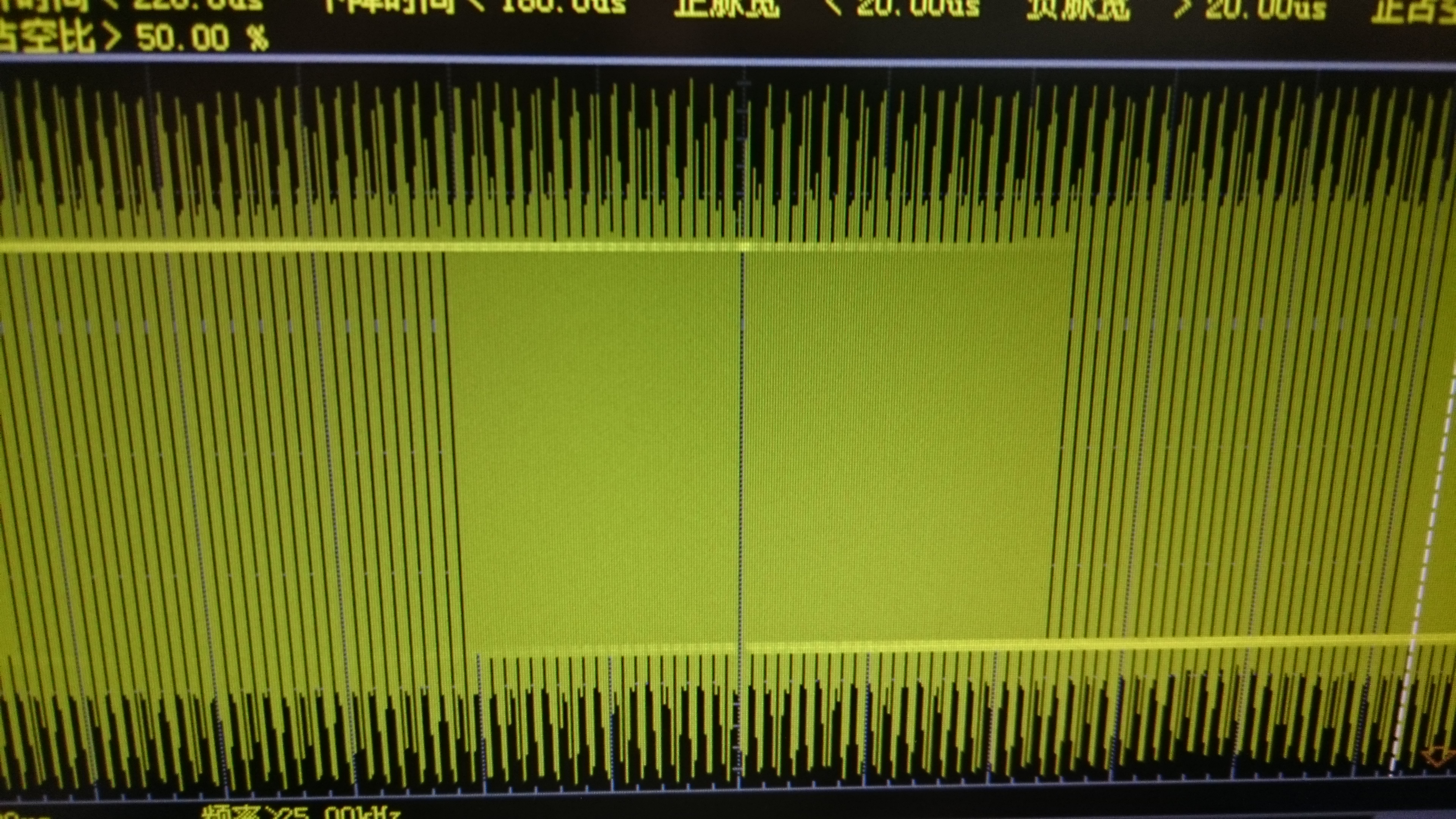
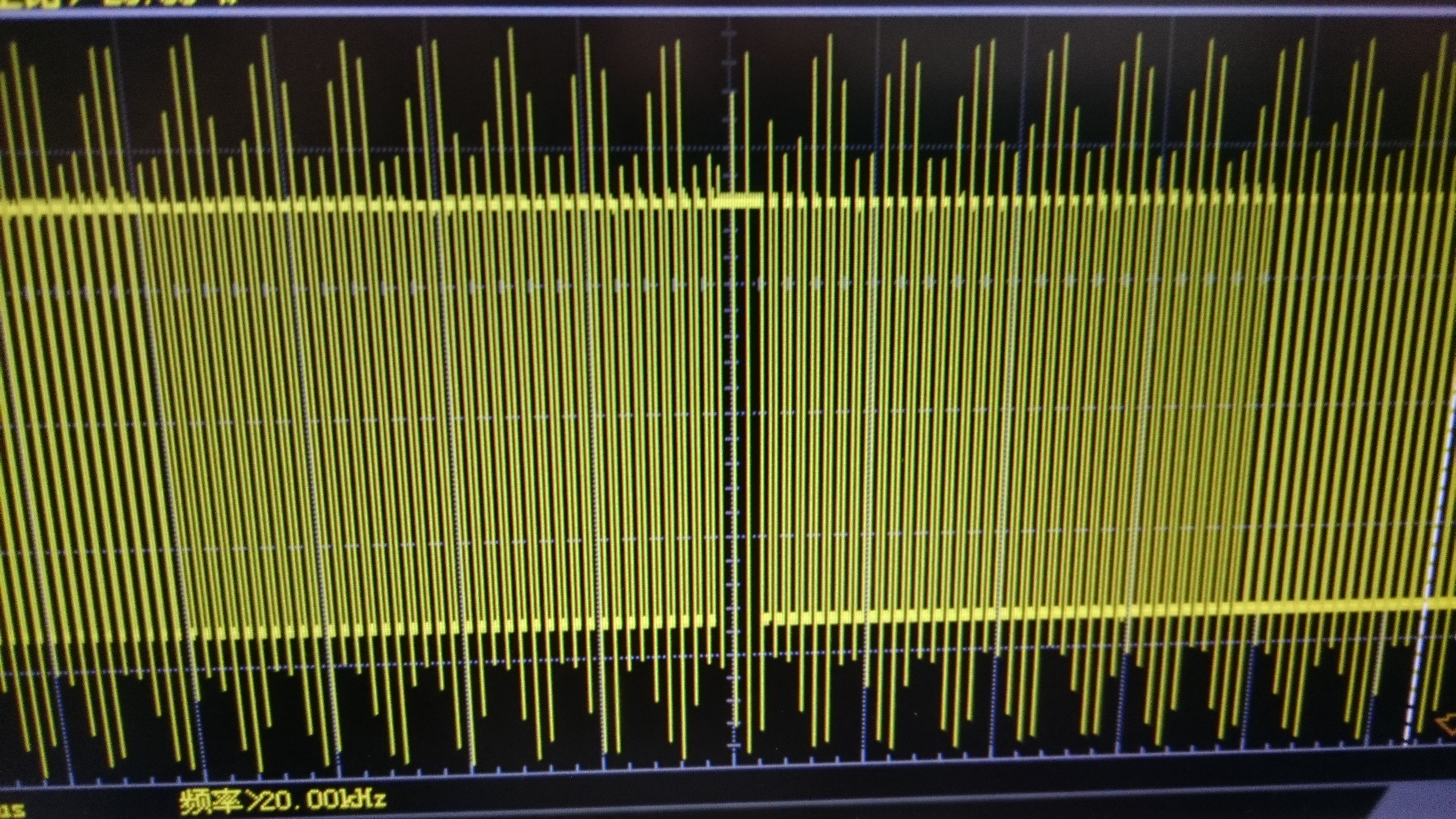
主时钟100MHz,经EPWMCLKDIV二分频,HSPCLKDIV二分频,CLKDIV二分频,相当于ePWM的TBCLK时钟为12.5MHz,使用查表法产生SPWM,然而在检查正弦表无误的情况下,波形有一定的瑕疵,周期性地出现满占空比的情况,如图(请忽略噪声尖峰的问题):
以前用MSP430做SPWM波形,也出现过这个问题,最后把定时器时钟设置得远远慢于主时钟才得以解决。MSP430功能不适合做SPWM,这也就算了,但是C2000应该不至于出现这种问题把?我以前用STM32,主时钟72MHz,定时器36MHz都不会出现这种满占空比的问题。请问这种情况该如何解决?或者官方有没有提供SPWM的源程序?在controlSUITE暂时没找到。