

SPRUI31文档中的PID实现框图如下,
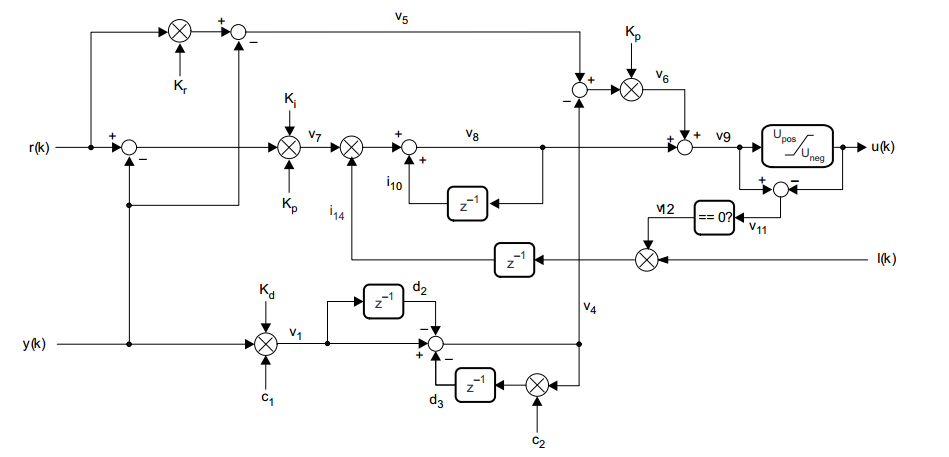
其中微分D模块的具体实现没看懂,能不能稍微讲解下
In this design, the input to the derivative path is the feedback y(k) rather than the loop error. This avoids
sharp discontinuous inputs when the reference set-point r(k) is changed suddenly from one level to
another. Discontinuities in the input to the derivative path produce large transients in the derivative path
that can disturb the loop; a phenomenon known as “derivative kick”. The use of y(k) alone for the
derivative path means the rate of change of the input is limited by the speed of the plant while the
damping properties of derivative action are unaffected.
谢谢。