If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
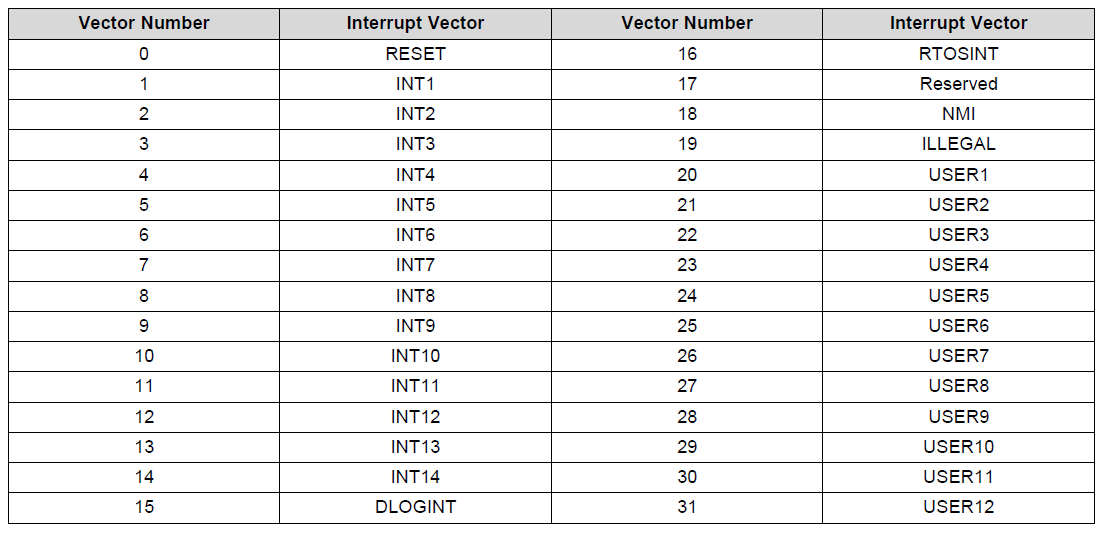
PINT USER1; // User Defined trap 1 第21个中断向量 PINT USER2; // User Defined trap 2 PINT USER3; // User Defined trap 3 PINT USER4; // User Defined trap 4 PINT USER5; // User Defined trap 5 PINT USER6; // User Defined trap 6 PINT USER7; // User Defined trap 7 PINT USER8; // User Defined trap 8 PINT USER9; // User Defined trap 9 PINT USER10; // User Defined trap 10 PINT USER11; // User Defined trap 11 PINT USER12; // User Defined trap 12 第32个中断向量
PINT USER1; // User Defined trap 1 第21个中断向量 PINT USER2; // User Defined trap 2 PINT USER3; // User Defined trap 3 PINT USER4; // User Defined trap 4 PINT USER5; // User Defined trap 5 PINT USER6; // User Defined trap 6 PINT USER7; // User Defined trap 7 PINT USER8; // User Defined trap 8 PINT USER9; // User Defined trap 9 PINT USER10; // User Defined trap 10 PINT USER11; // User Defined trap 11 PINT USER12; // User Defined trap 12 第32个中断向量