

Other Parts Discussed in Thread: MOTORWARE
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?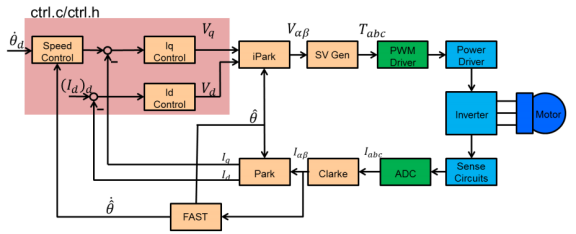
Other Parts Discussed in Thread: MOTORWARE
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?

