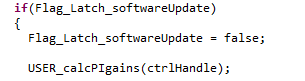
程序在运行时电流控制环的Kp这个参数为什么会跳变?
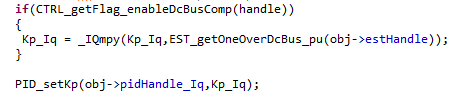
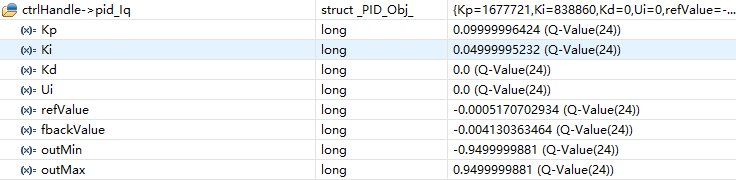
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!