
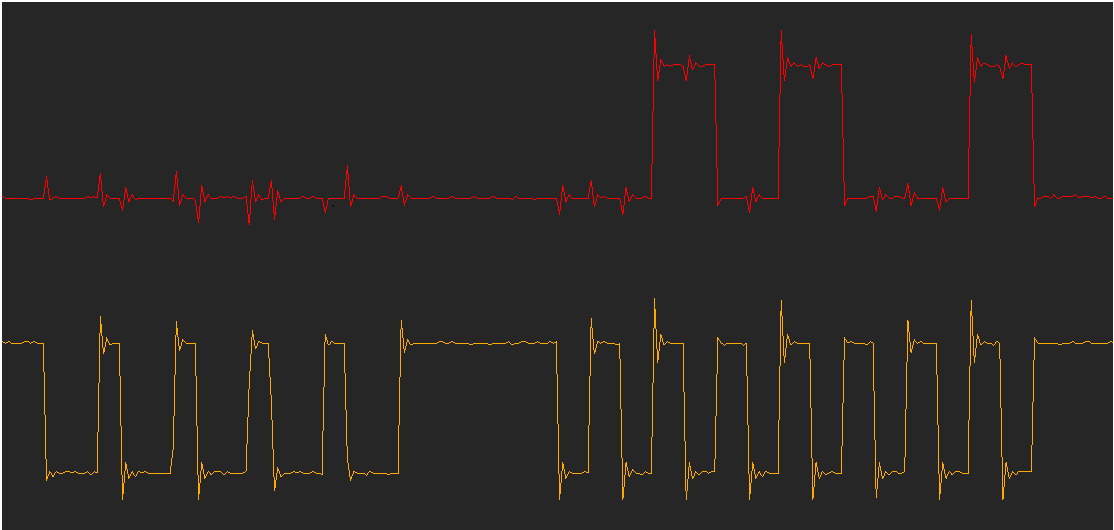
F28379d采用c2000ware编写,通过SPI与LCD屏幕(主控ST7735)通信时,只使用了MOSI,CLK以及其他两个普通的GPIO,使能FIFO,检查软硬件都没问题,但是一直调试不通,后来单独用示波器单独抓取CLK,MOSI时序发现了问题,在发送数据的时候直接连续发送时,如下图:
函数内部为SPI_writeDataNonBlocking(SPIA_BASE, data<<8);这时时序出现异常,原本一共5个字节但只有最后一个字节出来了,前面的字节时钟只有4个脉冲与数据信号都没有出来
后来试着在后面添加延时,当延时至少20us时,时序才算正常,五个字节全都出来了。
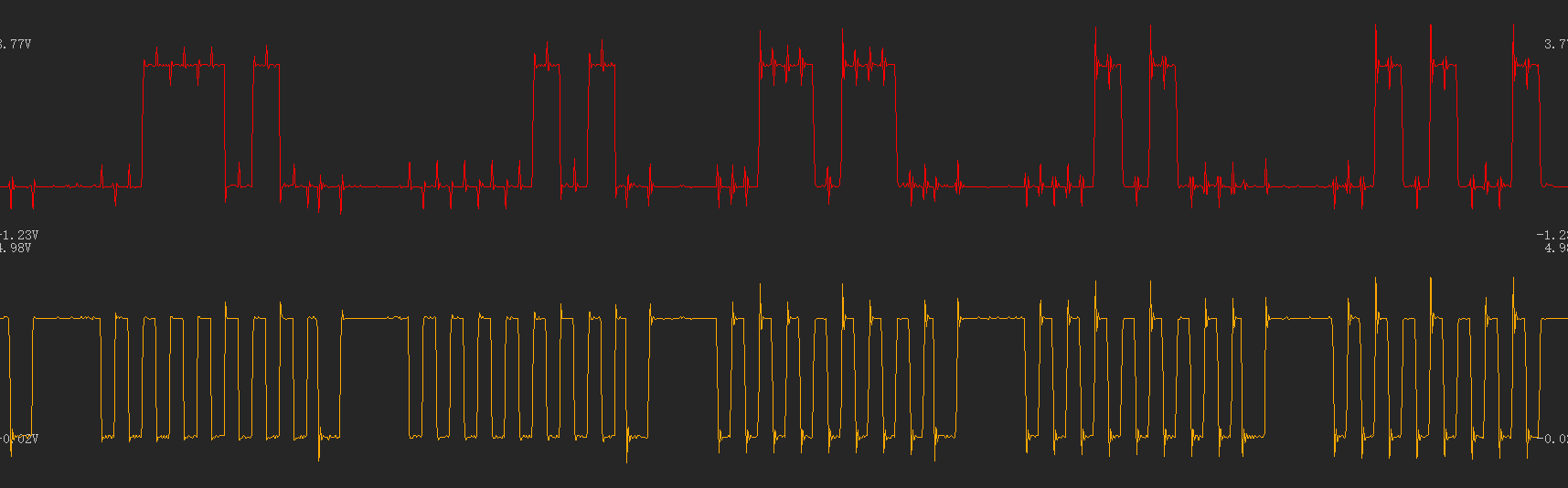
而且这个问题不论是否使用有阻塞,有fifo的传送方式都会存在,值得注意的是在延时10us或15us时,时序出现的问题又不一样,只有最后一个字节出来,前面的数据一个字节的时钟只有4个脉冲,感觉是发送没发送完就开始了下一个字节的发送。
但是原来使用的STM32(也是硬件SPI)都是直接这样连续发送使用的,但是移植在c2000上出现这种问题,请问这正常吗,出现异常的原因是什么,有没有方法解决
